You and me. Together.
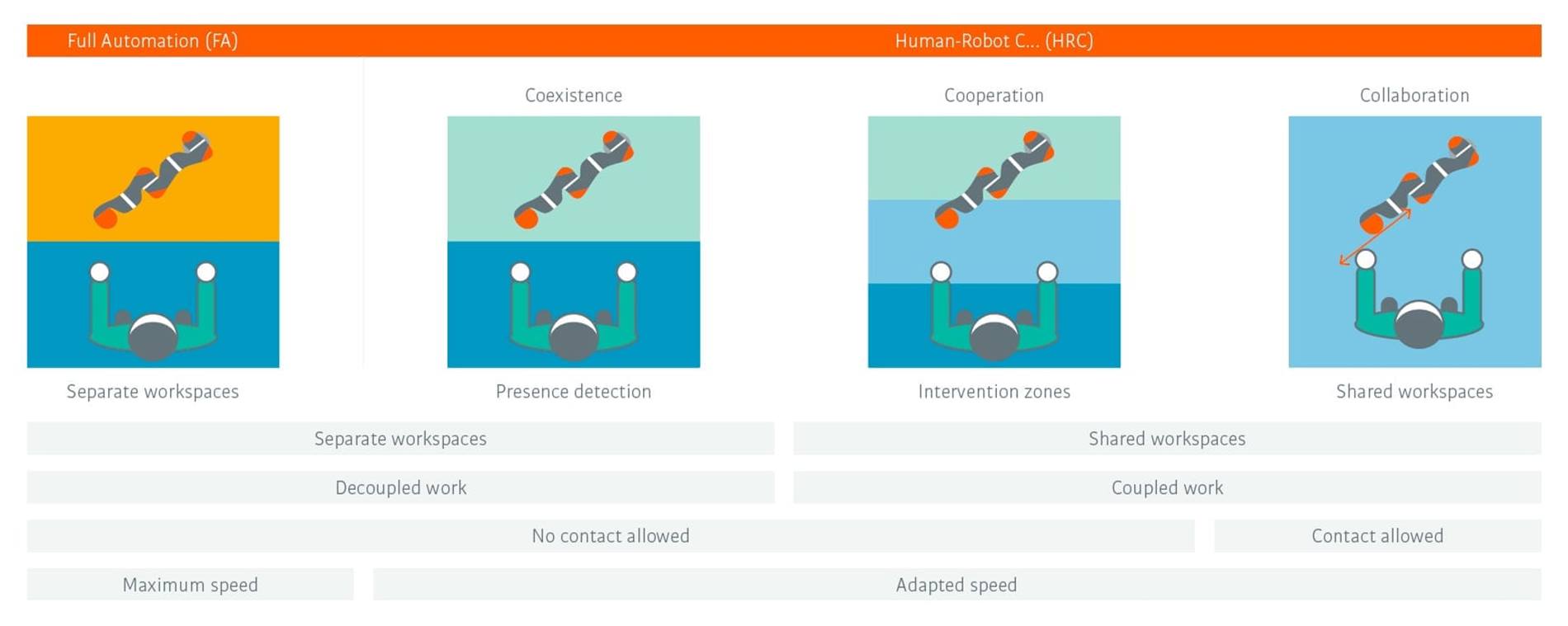
No safety fence separates man and robot. Both work directly together. This type of automation, known as human-robot collaboration (HRC), opens up huge potential. But when is a robot actually “collaborative”? And when does its use make sense?
First of all, it is necessary to question the goal of the application:
What level of human interaction do you need for the application?
There are “levels” of interaction and collaboration. The goal of your potential collaborative robot could be to simply assist a human worker – or it could be to have the robot working largely on its own, with a human checking in on it or interacting with it at various intervals.
The specific type of interaction you’re looking for will guide the first steps of your journey toward the right automation solution.
What kind of collaborative robot do you actually need?
If a decision is made in favor of an HRC solution, it often becomes apparent that a classic industrial robot – equipped with the right sensor capabilities, for example – can also work collaboratively.
If the focus is on the time requirements of an HRC application, it must be optimized in terms of movement so that the robot does not have to cover long distances if possible in order to be economically profitable. A cobot is not designed to move from A to B as quickly as possible. Its strength lies in safety and sensitivity. This allows it to work together with humans in very confined spaces and makes the human-machine team more productive. If the focus is on time requirements, the choice falls on an industrial robot suitably equipped for HRC.
Because not all HRC is the same:
1. Power and Force Limitation
The first is power and force limiting, which is the type that often comes to mind when people think of a collaborative system. The robot is limiting its power and force. Collision control is the focus.
2. Monitored stop
Savety fences become unnecessary. The robot stops as soon as the human enters the collaboration room. In this way, a collision is avoided. The advantage of this type of HRC is that classic industrial robots can also be used here.
3. Speed and Distance Monitoring
The third type of human-robot collaboration is speed and distance monitoring, which means the robot slows as a human gets closer to a determined point and will stop when that person is very close. The goal: to minimize the time loss caused by the human’s approach.
4. Hand guiding
The fourth type is referred to as teach by demonstration, or hand guiding. Here, the user guides the robot by hand at a monitored, safe speed. The permissible speed was defined in advance by a risk assessment.
Ultimately, it is the level of interaction that determines when a robot is collaborative. Because in principle, any robot can be a collaborative robot if it is only used in the right scenario.
HRC will make a significant contribution when it comes to implementing flexible, quickly adaptable production lines. The megatrend of individualized mass production can only be followed with flexible production concepts.
Are you looking for a robot-based automation solution for your operation? Then get in touch with us. KUKA will help you find the right solution for your application.