Az Internet Explorer kereső egy régebbi verzióját használja. Az optimális megjelenítés érdekében kérjük, frissítse keresőjét.
Robotikai kutatási projekt a gelsenkircheni főiskolán
A nyugat-németországi Gelsenkirchenben működő Westfälische Hochschule hallgatói az elektrotechnikai karon elsajátítják egy KUKA robot programozását és vezérlését. Ezáltal gyakorlatközeli módon készülhetnek fel szakmai életükre. Robin Krügert szó szerint megfogta diplomamunkája.
2019. május 14.
A KR AGILUS robot ideális a képzési tevékenységekhez
Markus Rüter nagyon fontosnak tartja a gyakorlati oktatást. „Az ipar területén nagyon sok minden mozgásban van – különösen ami a digitalizációt és a robotikát illeti. Erre szeretnénk felkészíteni a hallgatókat”, mondja a gelsenkircheni Westfälische Hochschule vezérlés- és szabályozástechnikai szakterületének professzora. Robotikai laboratóriumában is javában zajlanak az események. Mintegy két évvel ezelőtt arra „treníroztak” egy robotot, hogy kivédje a felé dobott teniszlabdákat. Néhány projektmunkával és egy diplomamunkával később a KR AGILUS sorozathoz tartozó KUKA robot már a labdák elkapására is képes.
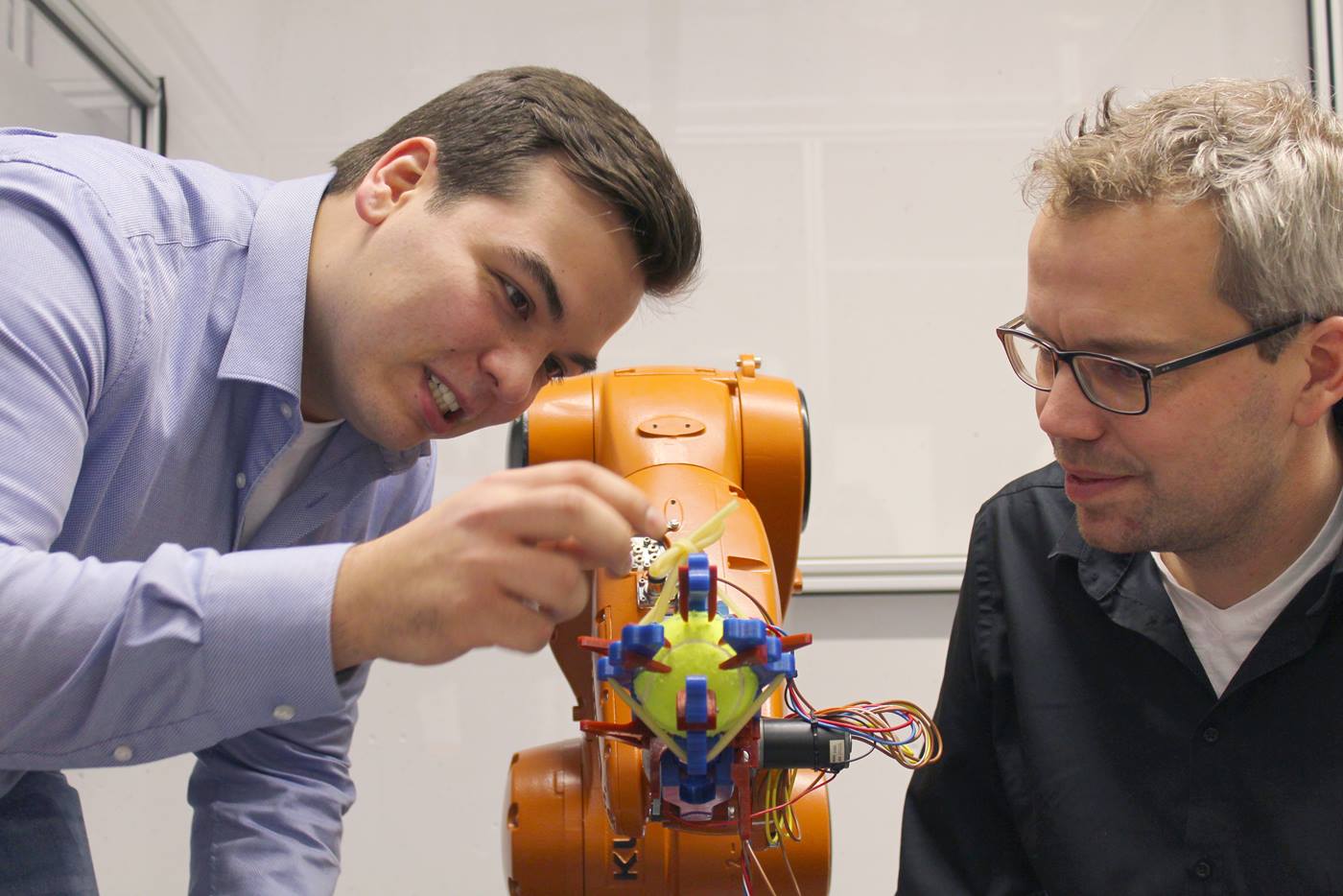
Robin Krüger (balra) és Prof. Markus Rüter a KR AGILUS robottal való munkavégzés során.
Beavatkozni, programozni, kreatívnak lenni – és mindezt egy robottal
A robotot Robin Krüger vezette el diplomamunkájával az elsőből a második dimenzióba. „Eddig a robot függőleges mozgást végzett a labda kivédése során. Most már arra is képes, hogy vízszintesen mozogjon – és el is kapja a labdát”, magyarázza. Ez nem volt könnyű feladat, ahogy azt Markus Rüter is kiemeli: „Az alkalmazás továbbfejlesztése során egy már meglévő rendszerbe kellett beavatkozni. Emellett a robot vezérlését is meg kellett ismerni, és az új követelményeknek megfelelően kellett beprogramozni.”
A labdát elkapó robottal a robotikai laborban végzett kísérlet felépítése.
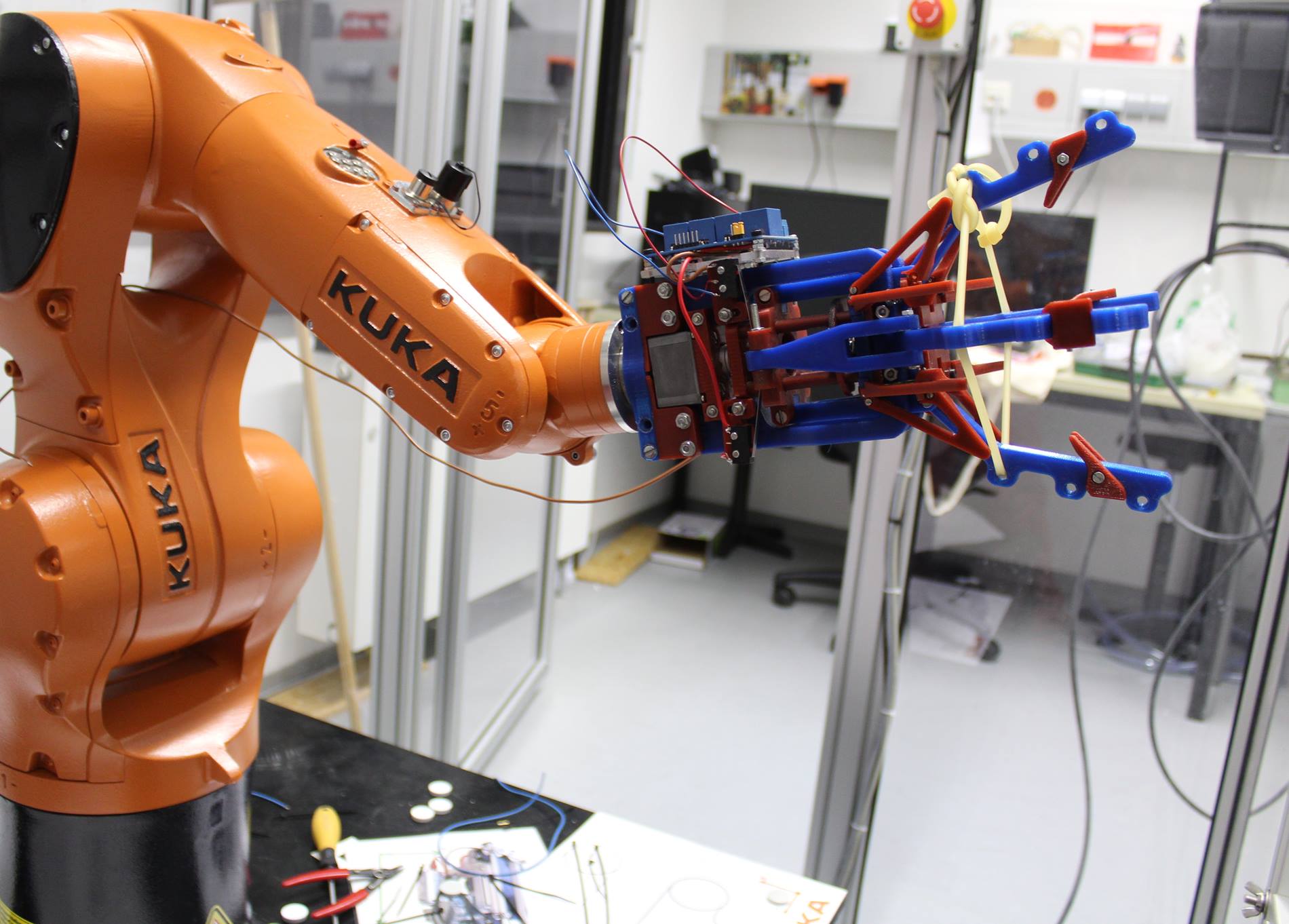
Nagyfokú kreativitásra volt szükség a megfogórendszer kifejlesztése során
A labdát továbbra is fényrácsokon dobják keresztül. Ennek alapján a KUKA robot vezérlése kiszámítja azt a pontot, ahová a labda a robot elérési tartományán belül érkezik. „Az újdonság az, hogy további fényrácsok segítségével már a vízszintes elkapási pont is meghatározható, és egy vezérlőegység által kiszámítható”, mondja Robin Krüger. „A robotvezérlés a vízszintes és a függőleges jelekből szinkronizálja a pontos elkapási pontot.”
A robotkar megfogórendszerének kifejlesztése rendkívüli kreativitást igényelt. Robin Krüger a vásári plüssállat-automaták megfogószerkezeteit használta mintaként. A megfelelő megfogóujjak 3D-nyomtatással készültek. A megfogórendszerhez szükséges energiát automatikusan előfeszített fitnesz-szalagok biztosítják. Amikor a labda becsapódik a megfogó közepére, egy mechanizmus kioldja a megfeszített fogóujjakat, amelyek szilárdan a labda köré záródnak. Ennél gyorsabb reakció aligha lehetséges.
A döntő pillanat: A megfogórendszer elkapja a teniszlabdát. Szuperlassított felvételen.