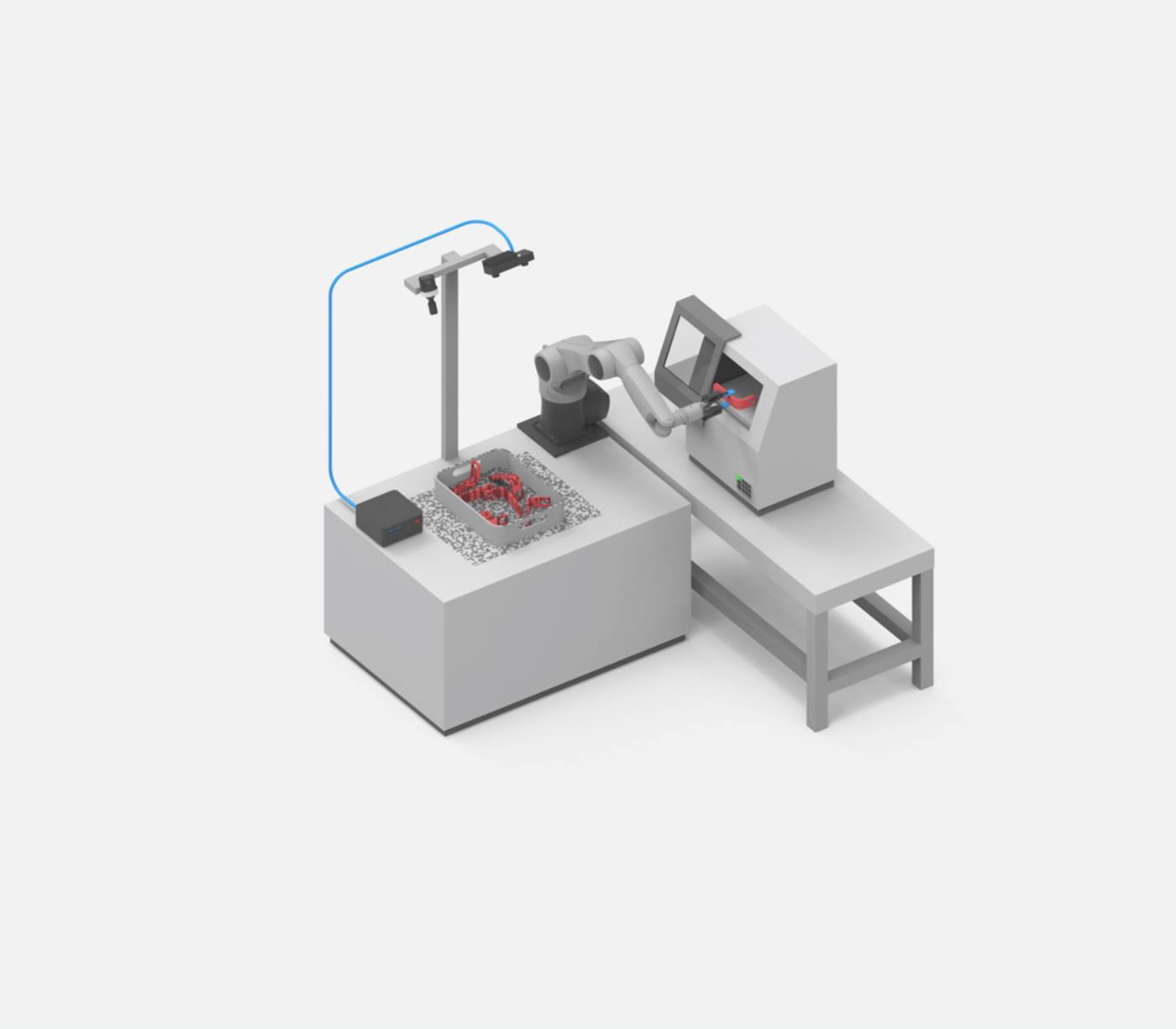
Rozpoznawanie, ustalanie struktury, chwytanie: Tak działa Bin Picking
Niezawodnie wyjmowanie części ze skrzyni bez uderzania o pojemnik: Dzięki pakietowi technologicznemu KUKA.SmartBinPicking można to teraz robić w sposób zautomatyzowany. Oprogramowanie w połączeniu z systemem Vision firmy Roboception umożliwia bezkolizyjne i pojedyncze wyjmowanie elementów z pudełka przez sześcioosiowego robota KR AGILUS, KR CYBERTECH lub KR IONTEC.