ความคุ้มทุนและความยืดหยุ่นสูงสุด: หุ่นยนต์เชื่อมอาร์กสำหรับทุกความต้องการ
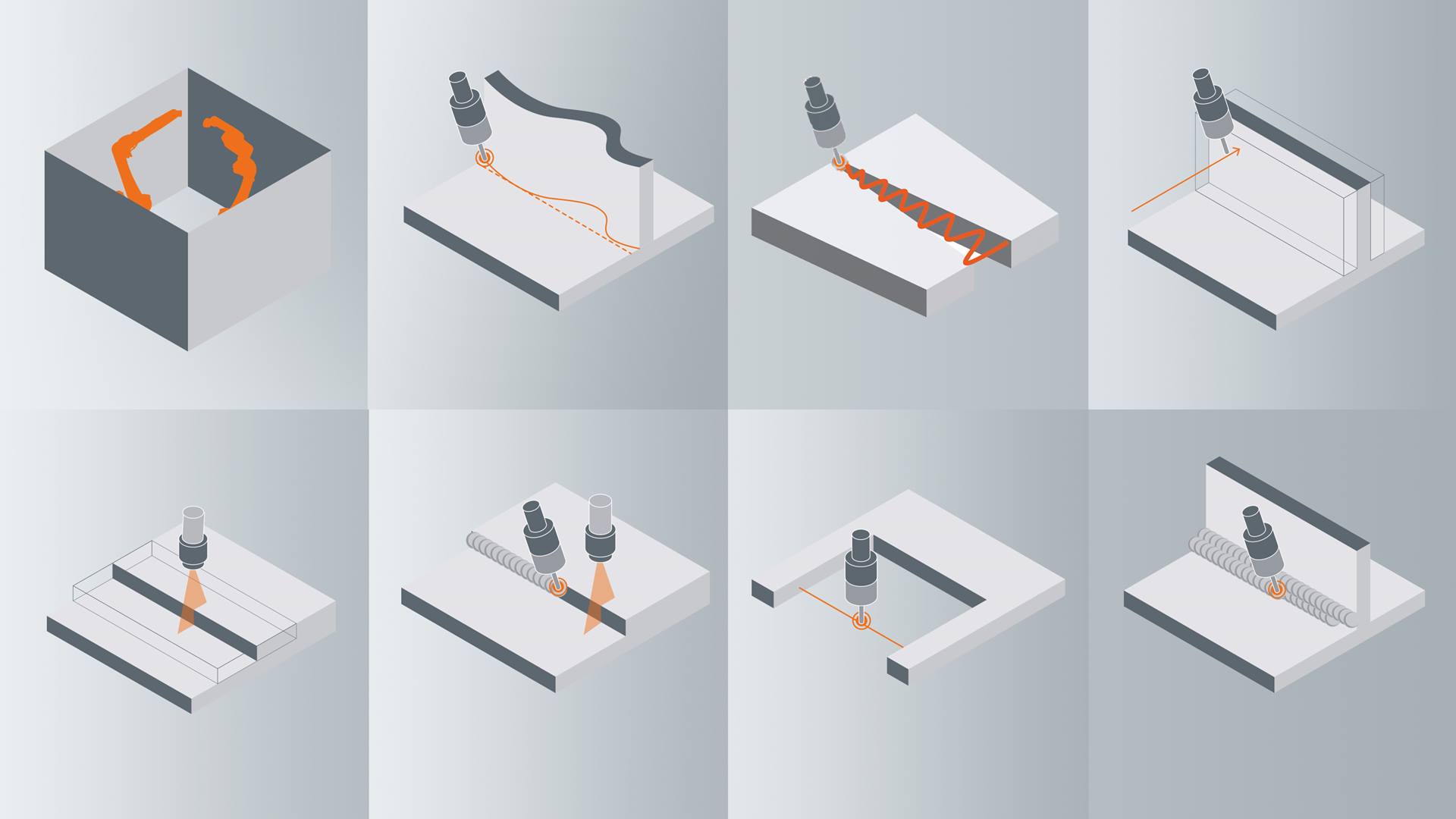
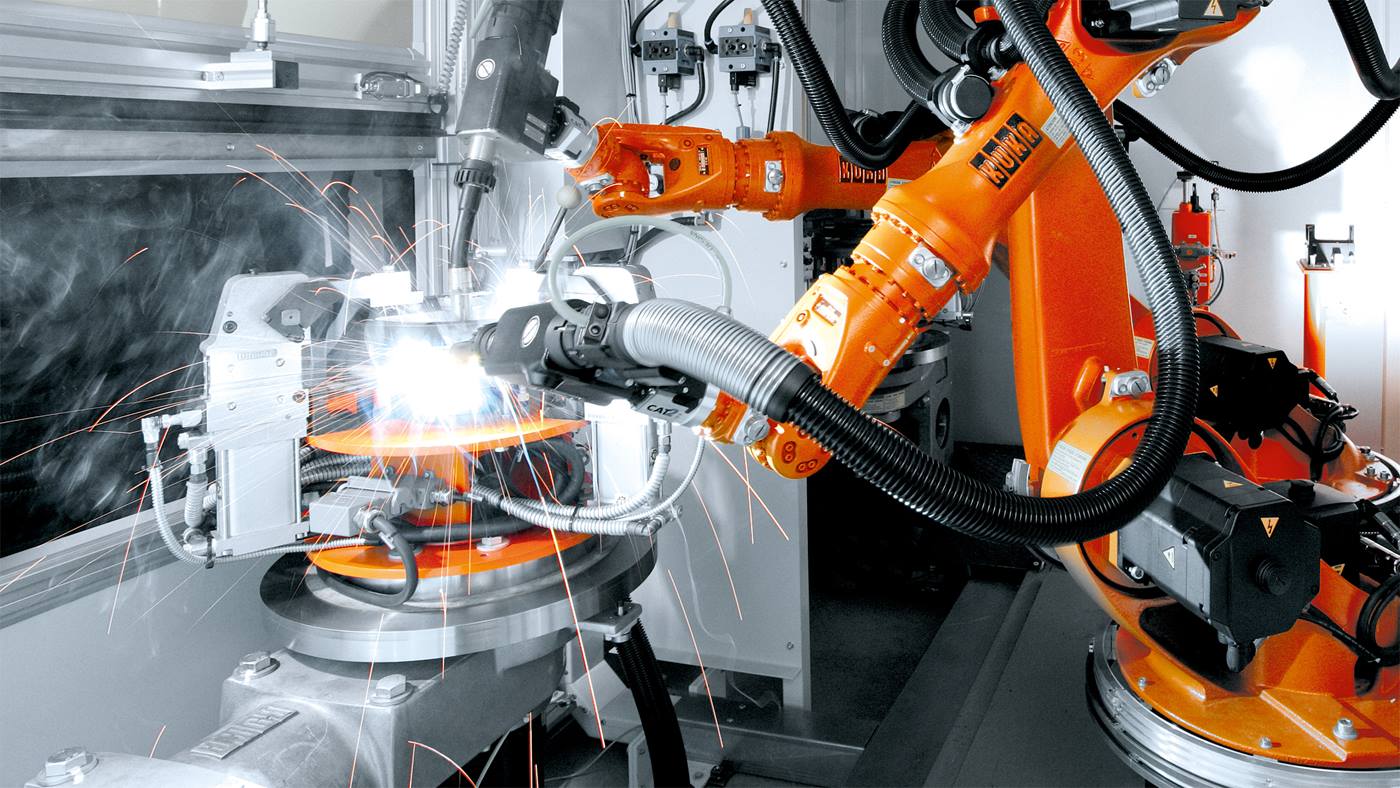
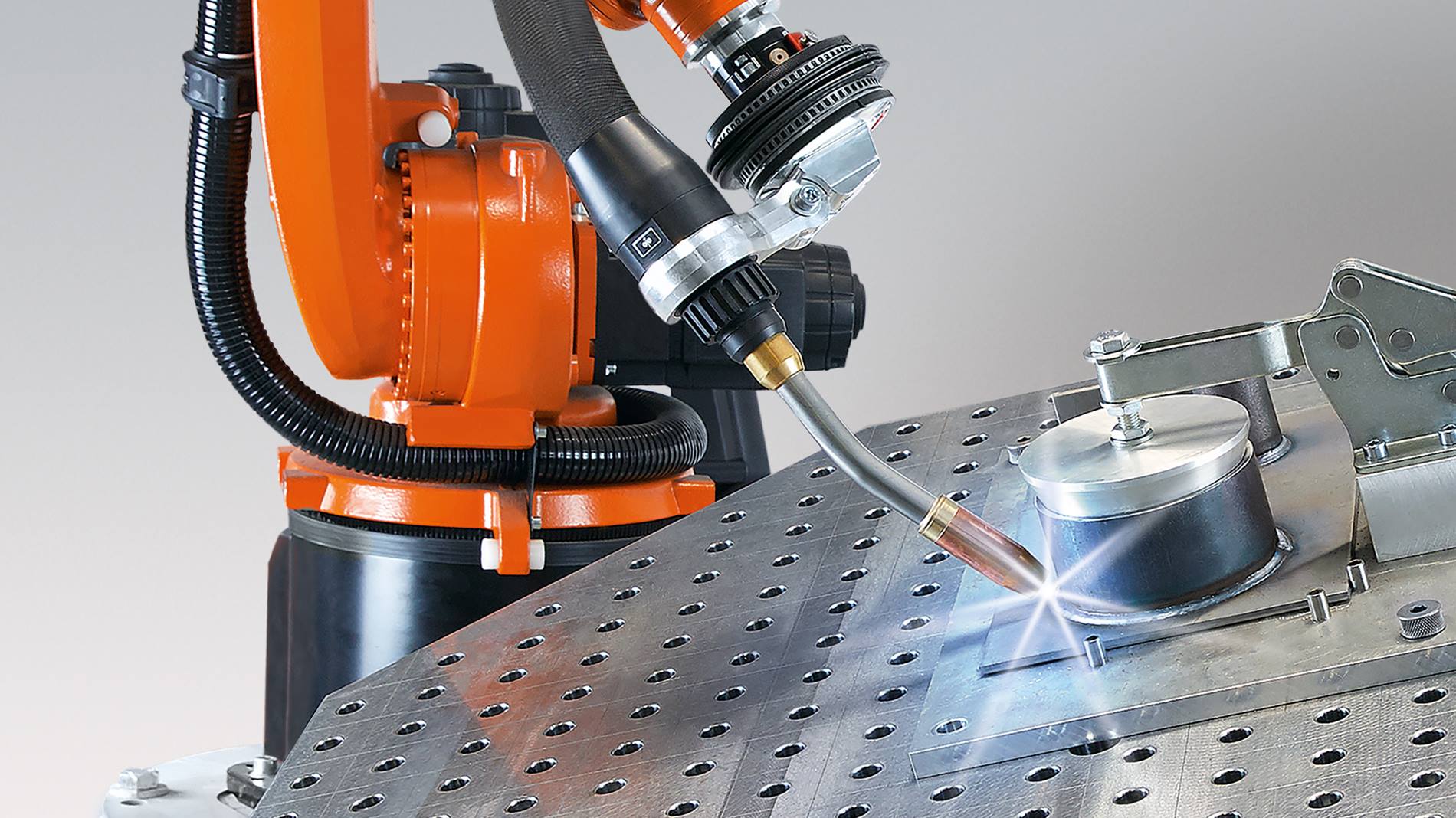
คุณจะได้รับประโยชน์จากหุ่นยนต์พิเศษสำหรับการเชื่อมไฟฟ้า ด้วยน้ำหนักบรรทุก 6 ถึง 22 กก. ซึ่งมีรัศมีการทำงานกว้างถึง 3,100 มม. และมีสองแบบคือหุ่นยนต์มือกลางหรือหุ่นยนต์เพลากลวง นวัตกรรมซอฟต์แวร์การเชื่อม เช่น KUKA.ArcTech และ โพสิชั่นเนอร์และlinear units ที่หลากหลายทำให้ข้อเสนอจำนวนมากของ KUKA สมบูรณ์ - สำหรับโซลูชั่นที่สมบูรณ์แบบที่สุดในระบบเชื่อมอัตโนมัติและสมรรถนะที่ดีที่สุดสำหรับระบบของคุณ