คุณใช้เบราเซอร์ Internet Explorers เวอร์ชั่นเก่า กรุณาอัปเดตเบราเซอร์ของคุณเพื่อการแสดงผลที่มีประสิทธิภาพสูงสุด
Robotics research project at the University of Applied Sciences in Gelsenkirchen
Students in the electrical engineering department at the Westphalian University of Applied Sciences in the city of Gelsenkirchen in western Germany learn how to program and control a KUKA robot. This provides them with practical preparation for their future careers. Robin Krüger literally had a ball with his master’s thesis.
14 พฤษภาคม 2562
The KR AGILUS robot is ideal for training purposes
For Markus Rüter, practice-oriented training is extremely important. “Things are really moving in industry – particularly with regard to digitization and robotics. We want to prepare students for this,” the professor of Control and Regulating Technology at the Westphalian University of Applied Sciences in Gelsenkirchen says. Things are also moving in his robotics lab. About two years ago, a robot was “trained” to deflect thrown tennis balls. Several projects and a master’s thesis later, the KUKA robot from the KR AGILUS series is even able to catch the balls.
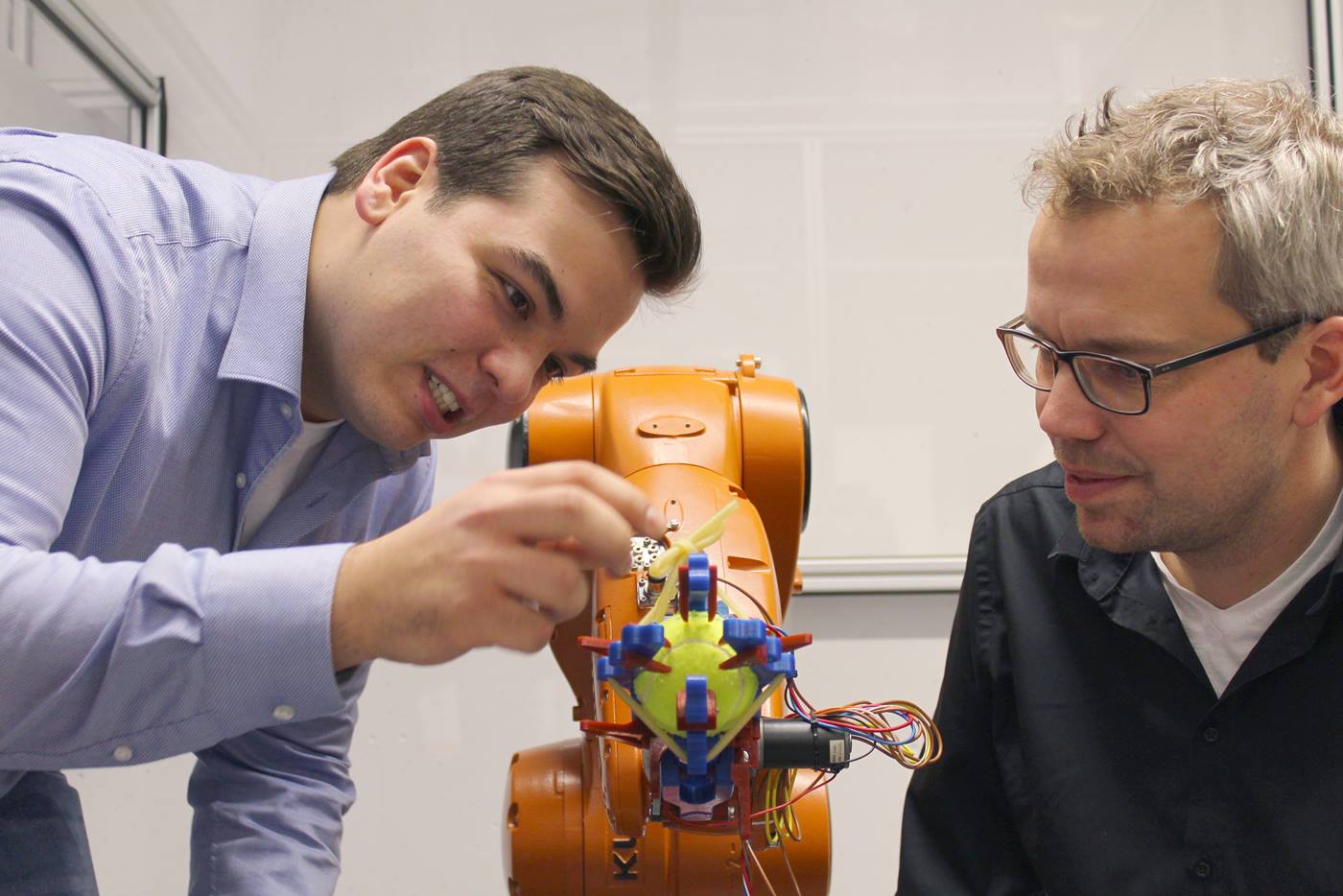
Robin Krüger (left) and Prof. Markus Rüter working with the KR AGILUS robot.
Integration, programming, being creative – all with a single robot
With his master’s thesis, Robin Krüger took the robot from the first dimension to the second. “Until now, the robot only moved vertically when deflecting the balls. Now it is also able to move horizontally – and to catch the ball,” he explains. The task was not a trivial one, emphasizes Markus Rüter: “Further development of the application entailed integration into an existing system. Furthermore, it was also necessary to learn about the robot controller and program it to the new requirements.”
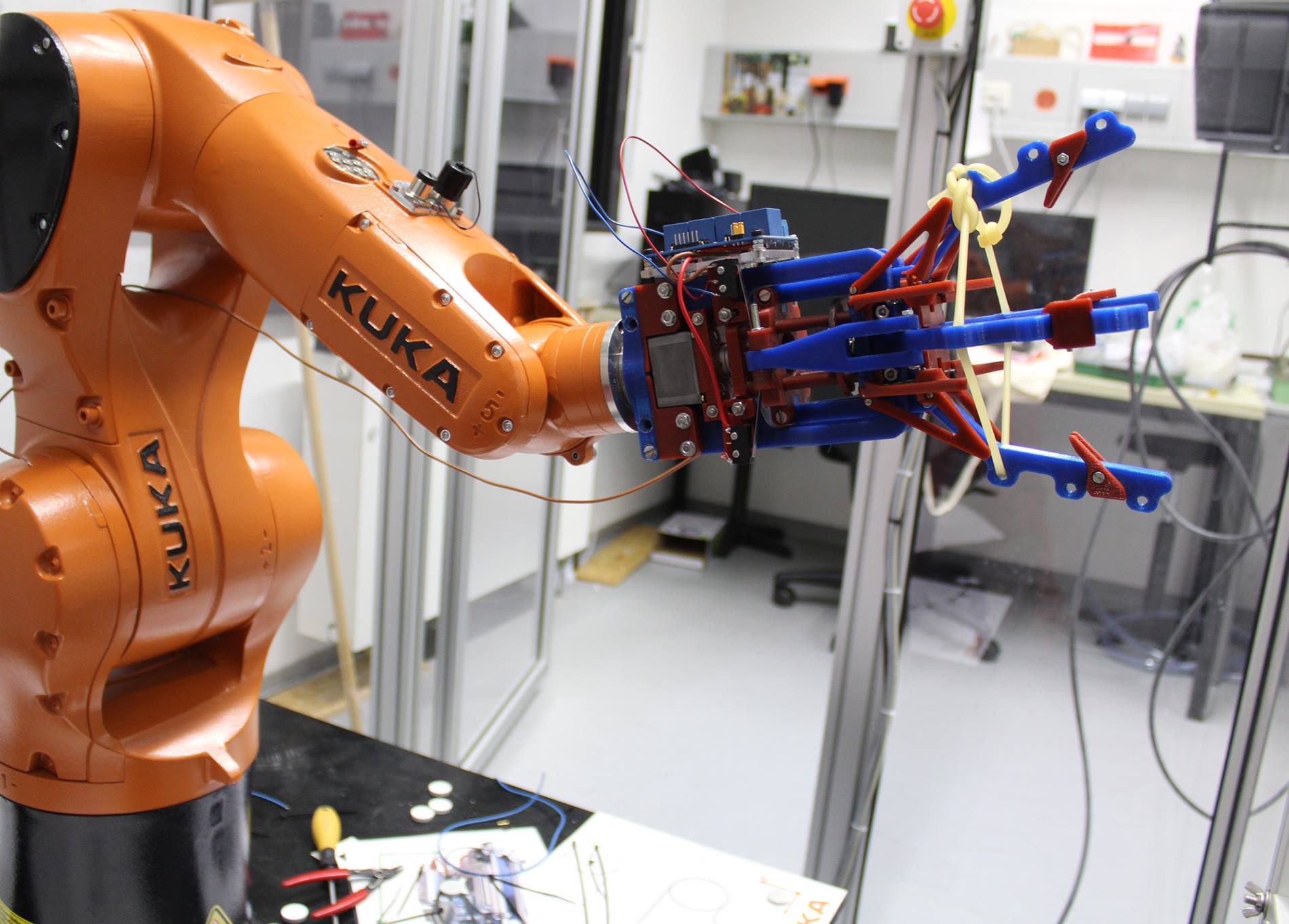
Test set-up of the ball-catching robot in the robotics lab.
Great creativity in the development of the gripper system
As before, the ball is thrown through light curtains. From this, the controller of the KUKA robot calculates the point in the catching range of the robot in which the ball will land. “What is new, is that the horizontal catching point is now also determined by means of additional light curtains and calculated by a control unit,” says Robin Krüger. “The robot controller synchronizes the exact catching point from the horizontal and vertical signals.”
The development of a gripper system for the robot arm required particular creativity. Robin Krüger based his gripper on those used to grab cuddly toys in a fairground claw machine. The gripper fingers were produced using a 3D printer. Automatically pre-tensioned resistance bands provide the energy required for the gripper system. When the ball strikes the center of the gripper, a mechanism releases the tensioned gripper fingers which then close firmly around the ball. A faster response is almost impossible.
The decisive moment: the gripper system catches the tennis ball. Recorded in super slow motion.