


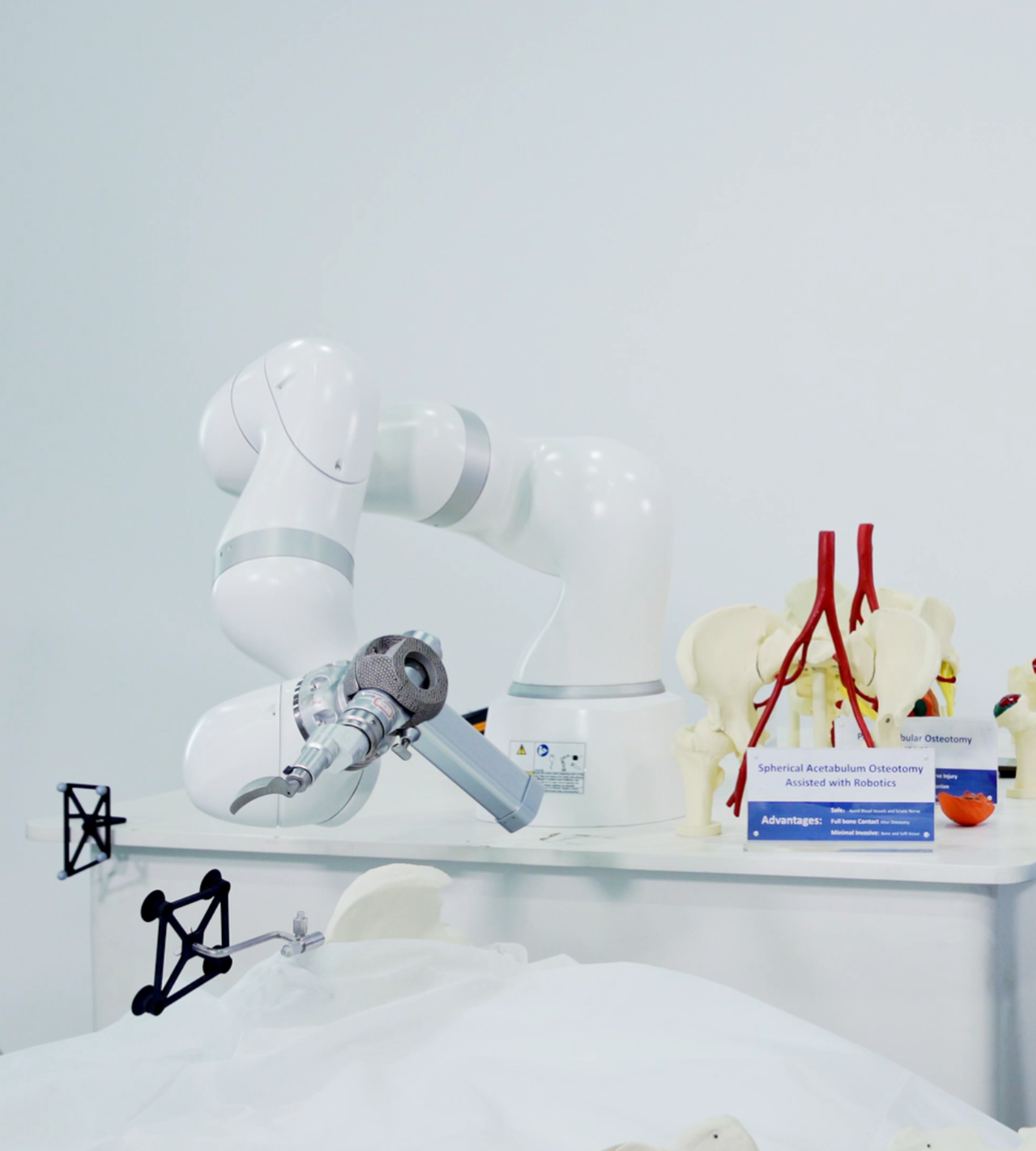
มุ่งสู่อนาคตด้วยหุ่นยนต์ช่วยผ่าตัดหมุนเบ้าข้อสะโพก
โรงพยาบาล Shanghai Sixth People’s Hospital ได้ผลิตต้นแบบอุปกรณ์ผ่าตัดกระดูกทรงกลมเป็นครั้งแรกในประเทศจีน พวกเขาได้รับการสนับสนุนจากฝ่ายวิจัยและพัฒนา ทรัพยากรการผลิตและการตลาดของ Shanghai Electric Group ในการปรับปรุงและปรับแต่งระบบผ่านการทดสอบต่างๆ ในอุตสาหกรรมและเข้าสู่ตลาดในที่สุด
พวกเขาหวังว่าผลิตภัณฑ์ของพวกเขาจะได้รับการส่งเสริมทั่วโลก เพื่อประโยชน์ของคนทั่วโลกและเป็นผู้ช่วยที่ดีสำหรับแพทย์
พวกเขาหวังว่าผลิตภัณฑ์ของพวกเขาจะได้รับการส่งเสริมทั่วโลก เพื่อประโยชน์ของคนทั่วโลกและเป็นผู้ช่วยที่ดีสำหรับแพทย์


