搬运:KUKA KR QUANTEC 机器人和波尔自动化公司 (BOLL AUTOMATION) 优化用于制造轴的轴管的取出操作
戴姆勒汽车股份公司采用的自动化解决方案缩短了周期时间并消除了停机及准备和加工后的处理时间
2016年7月27日
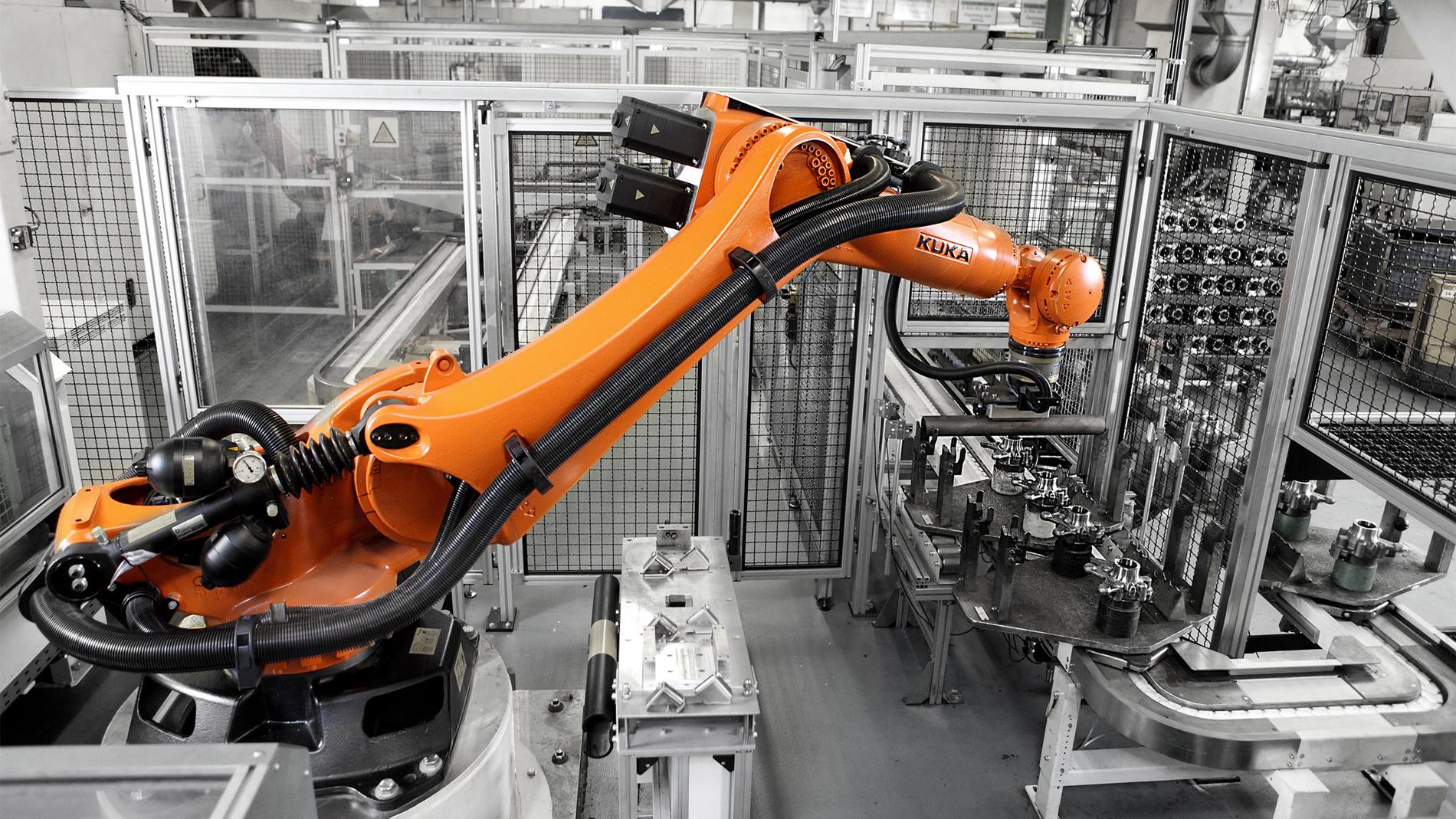
波尔自动化公司(Boll Automation)为商用车辆制造领军企业戴姆勒汽车股份公司研发了一个自动化解决方案,其中在机器人拾取装置中,一台 KUKA KR QUANTEC 机器人与波尔自动化公司视觉系统 Binspect® 共同合作,优化了用于制造轴的轴管的取出操作。
采用机器人可以确保技术流程,避免停机时间
机器人拾取装置中的流程开始于对所提供的新箱子进行的扫描过程。在显示器上模拟扫描结果,并在不足 0.1 秒的时间内规划出不会发生碰撞的机器人轨迹,然后机器人用磁力夹持器从箱子里取出最容易够到的轴管,并将其放在检测站上。检测站识别出相应的轴管型号,并提示机器人将其放在货物平台上。如果送入了一个错误的轴管型号,则会将其识别出来,并通过一个不合格件存放处剔出。取出箱子里的最后一根轴管后,波尔自动化公司视觉系统 Binspect® 会自动移动到下一个装满的箱子上,以便机器人可以立即取出其它轴管。同时,可在运行过程中将空箱子换成一个装满的箱子,以避免停机时间。此外,紧接着卸料流程会无缝衔接上流程链的下一个步骤。KUKA 机器人和视觉统 BINSPECT® 提高了效率
该系统解决方案具有多方面优势:即使在恶劣环境下也可确保稳定运行;无需准备和加工后的处理时间;可完全利用机器人工作单元的灵活性;由于采用 3D 扫描法,可以不受外部光线的干扰;并且具有 IP65 防护等级。此外,创新的软件解决方案还可确保短而实用的节拍时间,同时提高设备可用性。