調試和編程設計焊接機器人,非常簡單!
KUKA.ArcTech 為 KUKA 機器人系統增加了可進行由機器人輔助進行氣體保護焊的直覺式指令、結構分明的功能表和實用的狀態按鍵, 為使控制簡易又方便,除了常用的 KUKA smartPAD 操作面板,還新增了許多實用的狀態按鍵,用以操控焊接程序及電源 。將整合式的 EasyTeach 狀態按鍵鏡像複製到 6D 滑鼠的 KUKA.ready2_pilot 按鍵上,雙眼無須離開焊縫,即可編程設計焊接技術指令。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果
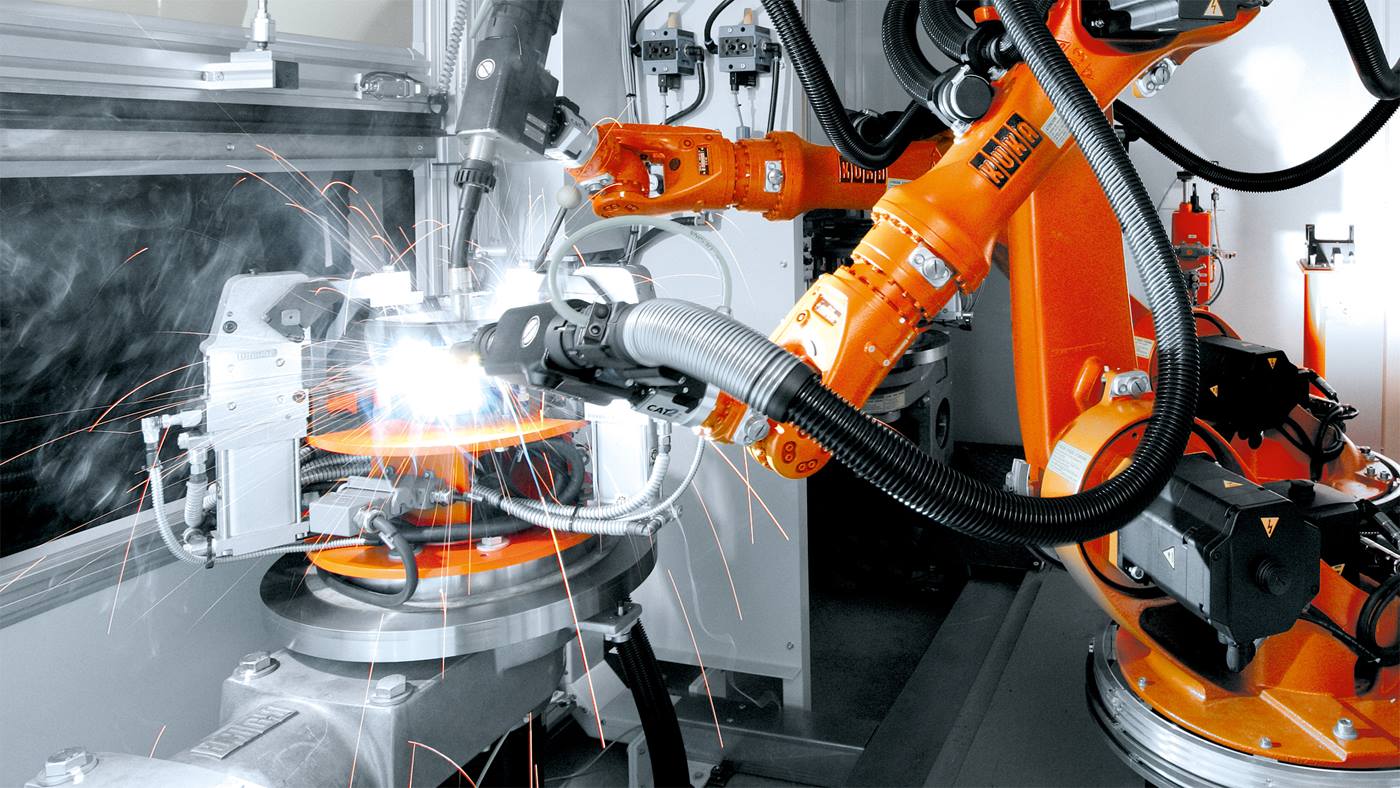
使用 KUKA.ArcTech 系列產品的 KUKA 機器人將成為焊接機器人。透過實用的選配套件可輕鬆且直覺式地操作和編程設計焊接應用,同時還能確保品質。
KUKA.ArcTech 為 KUKA 機器人系統增加了可進行由機器人輔助進行氣體保護焊的直覺式指令、結構分明的功能表和實用的狀態按鍵, 為使控制簡易又方便,除了常用的 KUKA smartPAD 操作面板,還新增了許多實用的狀態按鍵,用以操控焊接程序及電源 。將整合式的 EasyTeach 狀態按鍵鏡像複製到 6D 滑鼠的 KUKA.ready2_pilot 按鍵上,雙眼無須離開焊縫,即可編程設計焊接技術指令。
預先配置的焊接來源設定檔可確保與所有常用電源的高度相容性,還可實現簡單的整合作業。由於採靈活的設計,可透過 任務模式 / 程式模式(透過程式編號預設標準值)或 特性曲線模式 / 通道模式(透過數項焊接參數預設標準值)操控電源。
機器人控制器系統透過現場匯流排與電源進行通訊,例如:與標配的 EtherCAT。只須滑鼠一按,就能輕鬆透過 KUKA.WorkVisual 和預設的 Binzel、ESAB、EWM Fronius、Kemppi、Megmeet、Miller、Lincoln、Lorch 和 SKS 電源等配置來建立焊接系統的整體性配置,透過個人化參數化來根據需求優化配置。
選配套件提供多種功能可選,可用來輕鬆操作、有效和快速編程設計氣體保護焊程序。如此即可有針對性地反映電弧焊接程序的各種要求。
KUKA.ArcTech Basic 是該系列產品的基礎模組。它提供所有基本功能,可解決一般常見的焊接問題。不論待操控的電源是 MIG/MAG、WIG 或電漿設備等都不成問題。
KUKA.ArcTech 焊接參數管理可確保簡易地編程設計和優化焊接參數。此可透過將焊接說明或焊接程序規範書(WPS,welding procedure specification)顯示在焊接數據集中來達成。
KUKA.ArcTech Advanced 擴增了 KUKA.ArcTech Basic 的功能範圍。此附加選項可解決焊接技術性要求更高的焊接任務,例如:以達到嚴苛的冶金特性以及提供擴增的程序監控功能。
KUKA.ArcSense 擴增了 KUKA.ArcTech Basic 的功能範圍。
KUKA.ArcSense 會分析回饋訊號(實際焊接參數),然後補償程序相關的偏差,例如:因熱變形或零件不精確所致。
KUKA.ArcSense 應用軟體 是一種焊縫追蹤(through-arc-seam-tracking,TAST)感應器,用以在板厚 > 3 mm 的角焊縫和 V 形焊縫上進行 TCP 位置修正。要確保該功能可靠運行,需要一個配備恆定電壓特徵曲線(CV)的合適 MIG/MAG 焊接程序以及一個適用於電弧感應器的回饋訊號。
若預定的焊接電源未於現場匯流排介面上提供合適的回饋訊號,則 KUKA.ArcSense 亦可與分流器搭配使用。
KUKA.ArcTech MultiLayer 擴增了 KUKA.ArcTech Basic 用以簡易和快速編程設計多層焊縫的功能,這些功能操作非常簡便。根據以規定之程式結構進行編程設計的根層,透過特定的偏移值決定填充層或覆蓋頂層的位置。此外,KUKA.ArcTech MultiLayer 還可為每個編程設計的焊縫區段設定專屬的焊接參數。
為達最大化生產力,KUKA.ArcTech MultiLayer 可與 KUKA.ArcSense 或 KUKA.SeamTech Tracking 搭配使用。為優化熱能輸入,在個別填充層和覆蓋頂層後還可執行其他的焊接任務。
KUKA.ArcTech AdaptiveWelding 會處理測量參數,例如:焊縫量、間隙寬度或與邊緣高度的偏差,以自動化焊接參數的相應調整。無論是在焊接前或焊接期間偵測到偏差都一樣。連續調整規定值可確保焊縫品質恆定、可靠,並提高應用的生產率。
使用 KUKA.ArcTech AdaptiveWelding 可透過可配置的介面於焊接程序進行中無段式調整焊接參數或逐步根據零件公差和其他不規則性進行調整。