La collaboration commence dès l'application
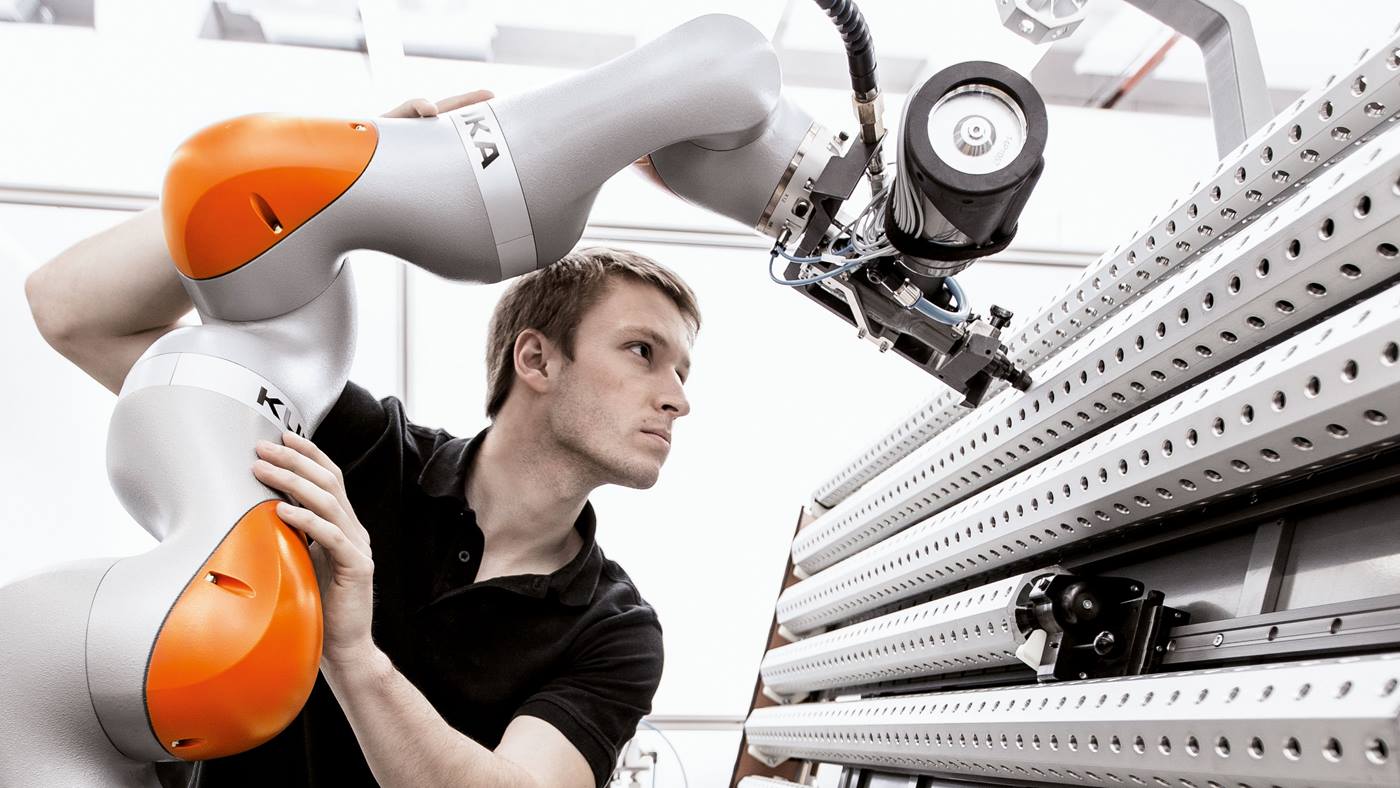
Vous envisagez d'acheter un robot collaboratif? Si beaucoup font le pas, peu réalisent que c'est leur application qui détermine le niveau de collaboration avec l'opérateur et non le robot. Une adoption réussie dépend de l'adéquation entre le stade de la collaboration homme-robot et votre application. Mais comment savoir quelle étape est la bonne pour vous?