Artificial eyeไม่เคยทําพลาด
ประสิทธิภาพกล้องของเซลล์หุ่นยนต์ตัวใหม่ที่มี artificial eye ที่ Danfoss เป็นคู่แข่งสำคัญสำหรับรางวัล “ความสำเร็จระดับมาสเตอร์ของการจดจำแบบ 3 มิติ” เนื่องจากระบบสามารถตรวจจับชิ้นส่วนประกอบต่างๆ ในการผลิตได้มากกว่า 100 ชิ้น ระบบช่วยให้มั่นใจได้ว่า หุ่นยนต์ของ KUKA ในเซลล์ของผู้ผลิตระบบไฮดรอลิกแบบเคลื่อนที่สัญชาติเดนมาร์กจะทำการโหลดและถ่ายเครื่องจักรแบบอัตโนมัติเต็มรูปแบบและมีประสิทธิภาพในระหว่างกระบวนการผลิต การลงทุนในด้านระบบอัตโนมัติใหม่ช่วยให้ชาวสแกนดิเนเวียได้พบกับความนิยมของสมัย เนื่องจากชาวยุโรปเหนืออยู่ในอันดับที่ 6 ในเรื่องการใช้หุ่นยนต์ในอุตสาหกรรมการผลิตอย่างหนาแน่นอยู่แล้วเมื่อเปรียบเทียบทั่วโลก ไม่ใช่เรื่องน่าแปลกใจที่ KUKA สนับสนุนการทำให้โครงการเป็นจริงด้วยองค์ความรู้อย่างขะมักเขม้น ท้ายที่สุด ผู้เชี่ยวชาญด้านระบบอัตโนมัติในเดนมาร์กก็ส่งมอบหุ่นยนต์ได้เป็นส่วนมาก
การจดจำวัตถุชิ้นส่วนประกอบมากกว่า 100 ชนิด
หุ่นยนต์ KUKA ทั้งหมดหกตัวควบคุมขั้นตอนการทำงานในสายการผลิตใหม่ที่ Danfoss ซึ่งเคยดำเนินการแบบแมนนวลมาก่อน หุ่นยนต์เหล่านี้เคลื่อนย้ายชิ้นส่วนประกอบซึ่งแต่ละชิ้นมีน้ำหนักระหว่าง 5 ถึง 20 กิโลกรัม ระบบอัตโนมัติของกระบวนการนี้ช่วยให้ทีมทำงานหนักน้อยลงได้ ทั้งนี้ก็เพื่อให้พนักงานสามารถควบคุมงานที่เพิ่มมูลค่าได้มากขึ้น ระบบดังกล่าวช่วยให้เซลล์หุ่นยนต์สามารถเคลื่อนย้ายชิ้นส่วนประกอบต่างๆ ได้ถึง 100 ชิ้นโดยไม่จำเป็นต้องเข้าแทรกแซงด้วยตัวเอง
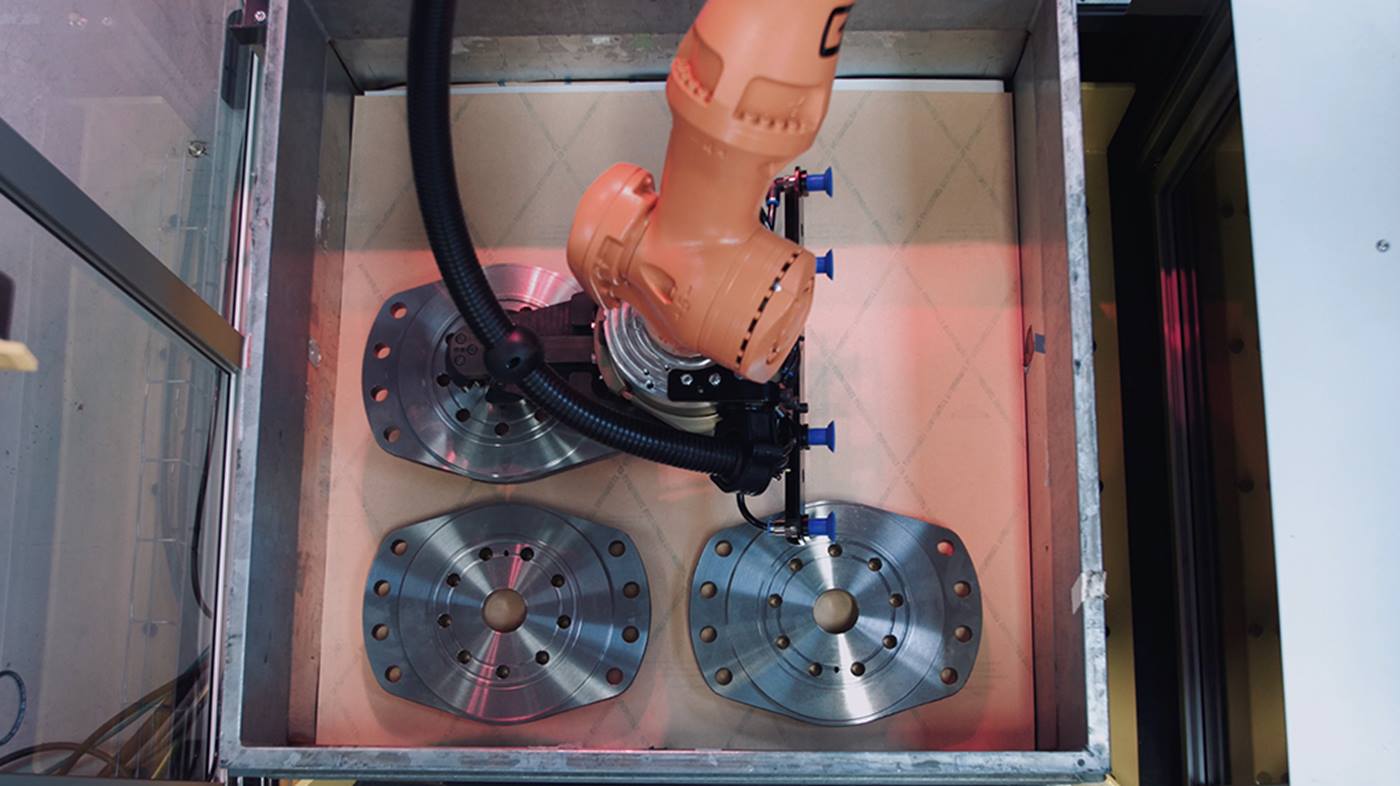
 หุ่นยนต์ KUKA ของผู้ผลิตระบบไฮดรอลิกแบบเคลื่อนที่ชื่อว่า Danfoss ในเดนมาร์กสามารถเคลื่อนย้ายชิ้นส่วนประกอบได้มากกว่า 100 ชิ้น
หุ่นยนต์ KUKA ของผู้ผลิตระบบไฮดรอลิกแบบเคลื่อนที่ชื่อว่า Danfoss ในเดนมาร์กสามารถเคลื่อนย้ายชิ้นส่วนประกอบได้มากกว่า 100 ชิ้น
“ซึ่งในการนี้มีความท้าทายอย่างมากในโครงการนี้” Olav K. Sjørslev ผู้จัดการฝ่ายขายของ
QRS พันธมิตรด้านบูรณาการ อธิบาย
“เงื่อนไขสำหรับเซลล์หุ่นยนต์ที่ Danfoss คือการป้อนชิ้นส่วนประกอบแบบอัตโนมัติโดยสมบูรณ์ งานที่มีรูปแบบที่หลากหลายที่สามารถแก้ไขได้ด้วยระบบกล้องเท่านั้น” หรือกล่าวได้ว่านั่นคือการส่งมอบชิ้นส่วนดิบที่จัดเรียงและจัดตำแหน่งอย่างพิถีพิถันนั้นไม่จะไม่สร้างกำไรให้ ในทางกลับกัน วัตถุต่างๆ จะเข้าไปในกล่องม้วนแบบมาตรฐานที่สถานีหุ่นยนต์แรกแทน ซึ่งได้จัดเรียงตามประเภทต่อกล่อง แต่จะเรียงซ้อนกันแบบสุ่มมากหรือน้อย ซึ่งวางไว้โดยการคั่นด้วยกระดาษ
ความร่วมมือกันที่ยอดเยี่ยมที่สุดระหว่างกล้อง เซ็นเซอร์สเตอริโอแบบ 3 มิติ rc_visard และหุ่นยนต์ของ KUKA
“จนถึงตอนนี้ ประสบการณ์ด้านระบบกล้องของเรายังมีไม่มากนัก” Sjørslev เล่า “ในช่วงสิบปีที่ผ่านมา เราได้ตรวจสอบระบบต่างๆ แต่ไม่พบโซลูชันการจับภาพแบบ 3 มิติสักโซลูชันที่พบว่าดี” ผู้จัดการฝ่ายขายย้ำว่า
สิ่งที่ใช้งานได้ในงานแสดงสินค้าหรือในห้องสาธิตของผู้ผลิตมักไม่สามารถใช้งานได้ภายใต้สภาพจริง สำหรับการจดจำวัตถุที่ท้าทายนั้น QRS ได้รับประโยชน์จากพันธมิตรทางธุรกิจอย่างใกล้ชิดกับ KUKA ที่มีมานานกว่า 15 ปี: KUKA เชื่อใจพันธมิตร
Roboception จากมิวนิกเมื่อพูดถึงระบบกล้องและการจดจำวัตถุ
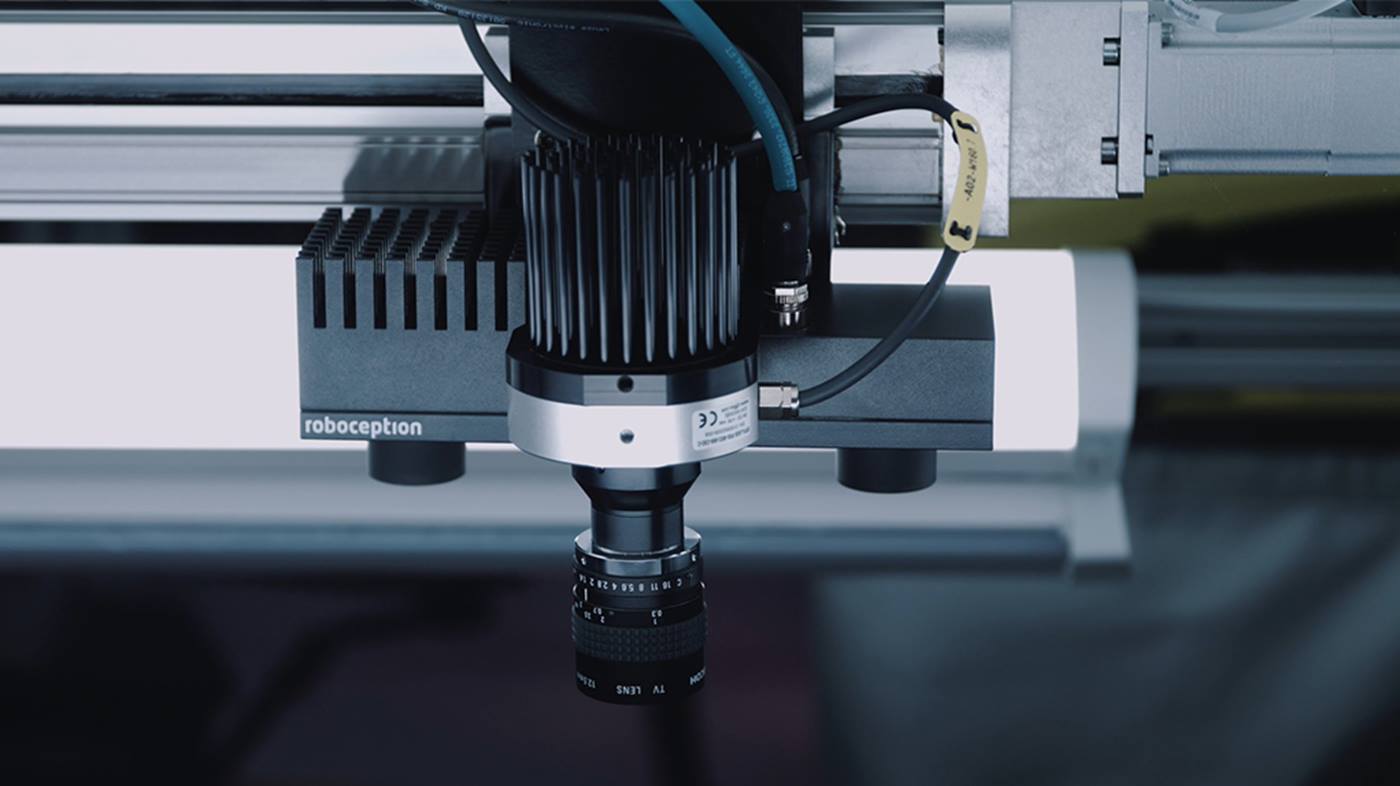 วิสัยทัศน์เชิงกล: Roboception ขอเสนอเซ็นเซอร์สเตอริโอแบบ 3 มิติที่เชื่อถือได้และนอกจากนี้ยังพัฒนาซอฟต์แวร์แบบโมดูลอีกด้วย
วิสัยทัศน์เชิงกล: Roboception ขอเสนอเซ็นเซอร์สเตอริโอแบบ 3 มิติที่เชื่อถือได้และนอกจากนี้ยังพัฒนาซอฟต์แวร์แบบโมดูลอีกด้วย
Roboception ไม่เพียงแต่นำเสนอเซ็นเซอร์สเตอริโอแบบ 3 มิติที่เชื่อถือได้ด้วย rc_visard เท่านั้น
แต่ยังพัฒนาส่วนประกอบซอฟต์แวร์แบบโมดูล ซึ่งเหมาะอย่างยิ่งสำหรับการใช้งาน เช่น เซ็นเซอร์ของบริษัท Danfoss สัญชาติเดนมาร์ก “
ซอฟต์แวร์ SilhouetteMatch ของเราจะทำให้ rc_visard ตรวบพบชิ้นส่วนประกอบต่างๆ โดยใช้เทมเพลต ซึ่งสร้างขึ้นจากข้อมูล CAD หรือจากข้อมูลที่สร้างขึ้นโดยตรงด้วยเซ็นเซอร์” Dr. Michael Suppa ซีอีโอของ Roboception อธิบาย ความร่วมมือกันกับหุ่นยนต์ KUKA ทำได้ง่ายและสำเร็จรวดเร็วด้วยการใช้เว็บอินเทอร์เฟซที่เป็นมาตรฐานและอินเทอร์เฟซผู้ใช้แบบกราฟิก
วิสัยทัศน์เชิงกล: จากวัตถุไปยังจุดจับที่เหมาะสม
ในกรณีของ Danfoss นั้นหมายถึง rc_visard ตรวจจับตำแหน่งและทิศทางของวัตถุที่แบนและไม่เป็นระเบียบบนพื้นผิวกระดาษเรียบได้อย่างน่าเชื่อถือ และส่งต่อจุดจับให้กับหุ่นยนต์ในทันที “โซลูชันแบบ 2 มิติ ถูกตัดออกจากโครงการนี้อย่างรวดเร็ว” Suppa อธิบาย “
ชั้นกระดาษไม่ได้เรียบหรือมีน้ำมันเสมอไป ทั้งนี้ขึ้นอยู่กับชิ้นส่วนประกอบ” ในการทดสอบกับระบบอื่นๆ บางครั้งกล้องก็ตีความรอยประทับบางส่วนผิดว่าเป็นชิ้นงาน
ในทางกลับกัน ซอฟต์แวร์ Roboception จะตรวจจับอย่างแม่นยำว่า ชิ้นส่วนประกอบใดถูกส่งไปยังเซลล์หุ่นยนต์ และส่งผ่านจุดจับที่เหมาะสมให้กับ KR CYBERTECH จาก KUKA หุ่นยนต์ตัวนี้จะนำชิ้นงานออกและป้อนเข้าเลเซอร์ทำเครื่องหมายก่อน จากนั้นชิ้นส่วนประกอบจะถูกขนส่งบนสายพานลำเลียงไปยังอีกเซลล์หนึ่ง
ในที่ที่ KR QUANTEC จะโหลดและถ่ายเครื่องเจียออกโดยอัตโนมัติ ในเซลล์ต่อไปนี้ KR CYBERTECH จะนำวัตถุที่แปรรูปแล้วไปยัง “ระบบการล้าง” และจัดเรียงลงในภาชนะหรือโหลดเครื่องเจียรขนาดเล็กอีกเครื่องหนึ่ง
การแลกเปลี่ยนองค์ความรู้ระหว่างผู้ที่เกี่ยวข้อง
สำหรับผู้ที่เกี่ยวข้อง ความคืบหน้าโครงการเป็นเหมือนการตกอยู่ในสถานการณ์ที่ยุ่งยากซับซ้อน “การใช้การรู้จักวัตถุเป็นประสบการณ์ใหม่สำหรับเรา หากเรากล้าทำอะไรแบบนั้น เราจะมองหาเฉพาะพันธมิตรที่เราเชื่อมั่นอย่างยิ่งและมั่นใจว่าพวกเขาจะสนับสนุนเราในระยะยาว” Olav Sjørslev จาก QRS เน้นย้ำ ซึ่งเขามีเพียงแต่สิ่งที่ดีที่จะพูดเกี่ยวกับการทำงานร่วมกับ Roboception และ KUKA “สำหรับโครงการนี้ ทุกคนที่เกี่ยวข้องยินดีที่จะถ่ายทอดองค์ความรู้และใช้เวลาไปโครงการนี้ล่วงหน้า” ซึ่งความพยายามก็ถือว่าคุ้มค่าในหลายๆ ด้าน การทำเช่นนี้ไม่เพียงแค่ลูกค้า/ผู้มอบหมายงานจะพึงพอใจเท่านั้น แต่การบูรณาการระบบกล้องของ Roboception ที่ประสบความสำเร็จยังรับประกันถึงคำสั่งซื้อถัดไปจาก QRS อีกด้วย
 ซอฟต์แวร์ Roboception ส่งจุดจับที่เหมาะสมไปยังหุ่นยนต์ KR CYBERTECH
ซอฟต์แวร์ Roboception ส่งจุดจับที่เหมาะสมไปยังหุ่นยนต์ KR CYBERTECH
โซลูชันที่มุ่งเน้นอนาคตสำหรับลูกค้าและผู้รวมระบบ
“เราได้ความรู้มากมายจากงานที่มอบหมายซึ่งช่วยให้โครงการอื่นๆ ของเราเกิดขึ้นได้” Sjørslev กล่าว “อิทธิพลของแสงส่งผลอย่างไร ข้อขัดข้องใดที่สามารถเกิดขึ้นได้บนเลนส์ และสามารถจดจำส่วนต่างๆ ได้จากระยะห่างเท่าใด ตอนนี้เรามีคำตอบที่เป็นรูปธรรมแล้ว” โซลูชันจาก KUKA, Roboception และ QRS ก็น่าพอใจสำหรับ Danfoss เช่นกัน ผู้เชี่ยวชาญด้านระบบไฮดรอลิกไม่เพียงแต่เร่งกระบวนการผลิตของเขาให้มีเสถียรภาพด้วยระบบอัตโนมัติเท่านั้น แต่ยังในขณะเดียวกันก็ช่วยให้พนักงานของเขามีความปลอดภัยในการทำงานมากขึ้น
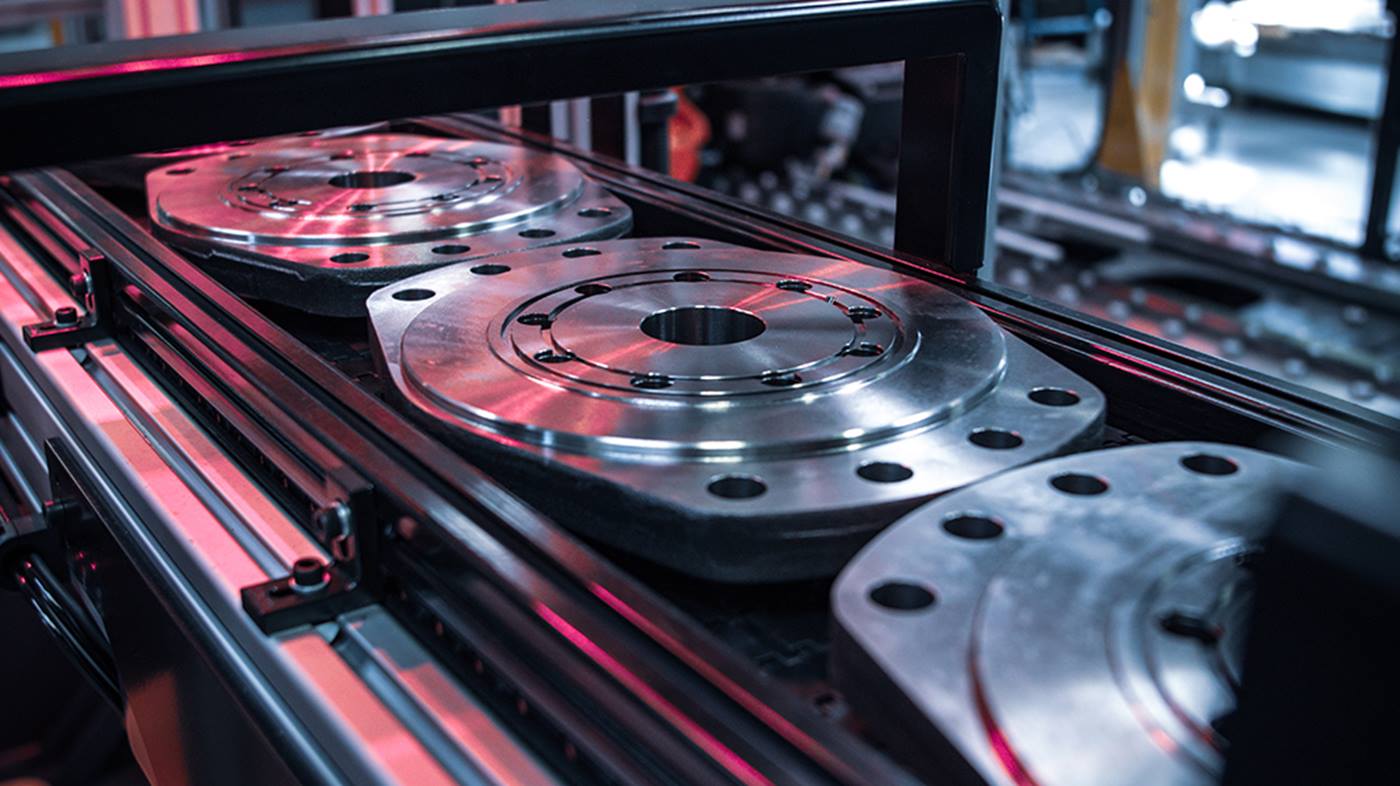
 โซลูชันวิสัยทัศน์แบบ 3 มิติที่ปรับเปลี่ยนได้ที่ Danfoss: โซลูชันนี้สามารถปรับให้เข้ากับงานอื่นๆ ได้อย่างยืดหยุ่น
โซลูชันวิสัยทัศน์แบบ 3 มิติที่ปรับเปลี่ยนได้ที่ Danfoss: โซลูชันนี้สามารถปรับให้เข้ากับงานอื่นๆ ได้อย่างยืดหยุ่น
นอกจากนั้นแล้ว ยังมีประเด็นสำคัญหนึ่งอย่าง นั่นคือ “ฮาร์ดแวร์ของเราสามารถแก้ปัญหาภารกิจได้หลากหลายโดยการรวมโมดูลซอฟต์แวร์อื่นๆ เข้าด้วยกัน” Dr. Michael Suppa จาก Roboception กล่าว “ตอนนี้ Danfoss มีโซลูชันการจับภาพแบบ 3 มิติที่ปรับเปลี่ยนได้ซึ่งสามารถปรับให้เข้ากับงานอื่นๆ ได้อย่างง่ายดาย หากจำเป็น”