软件的应用领域
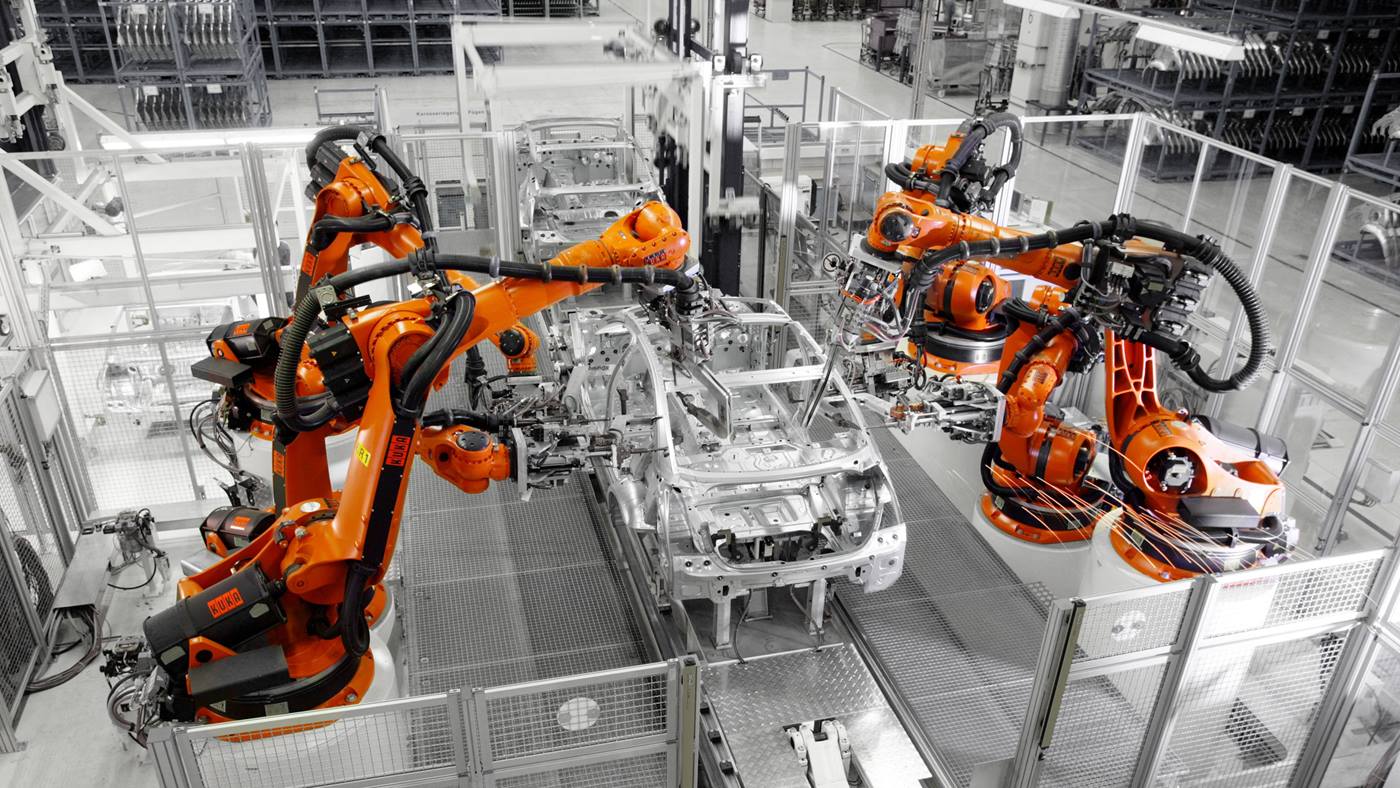
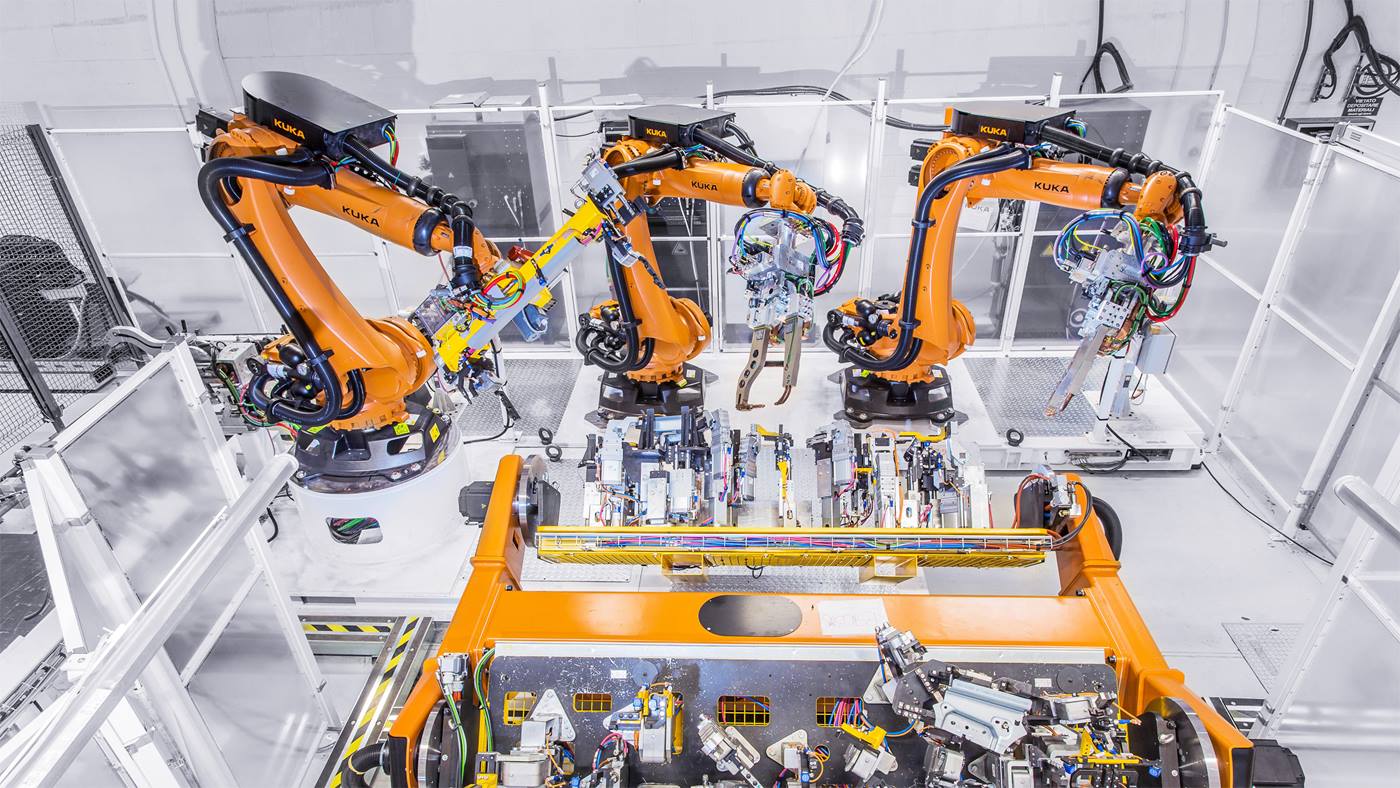
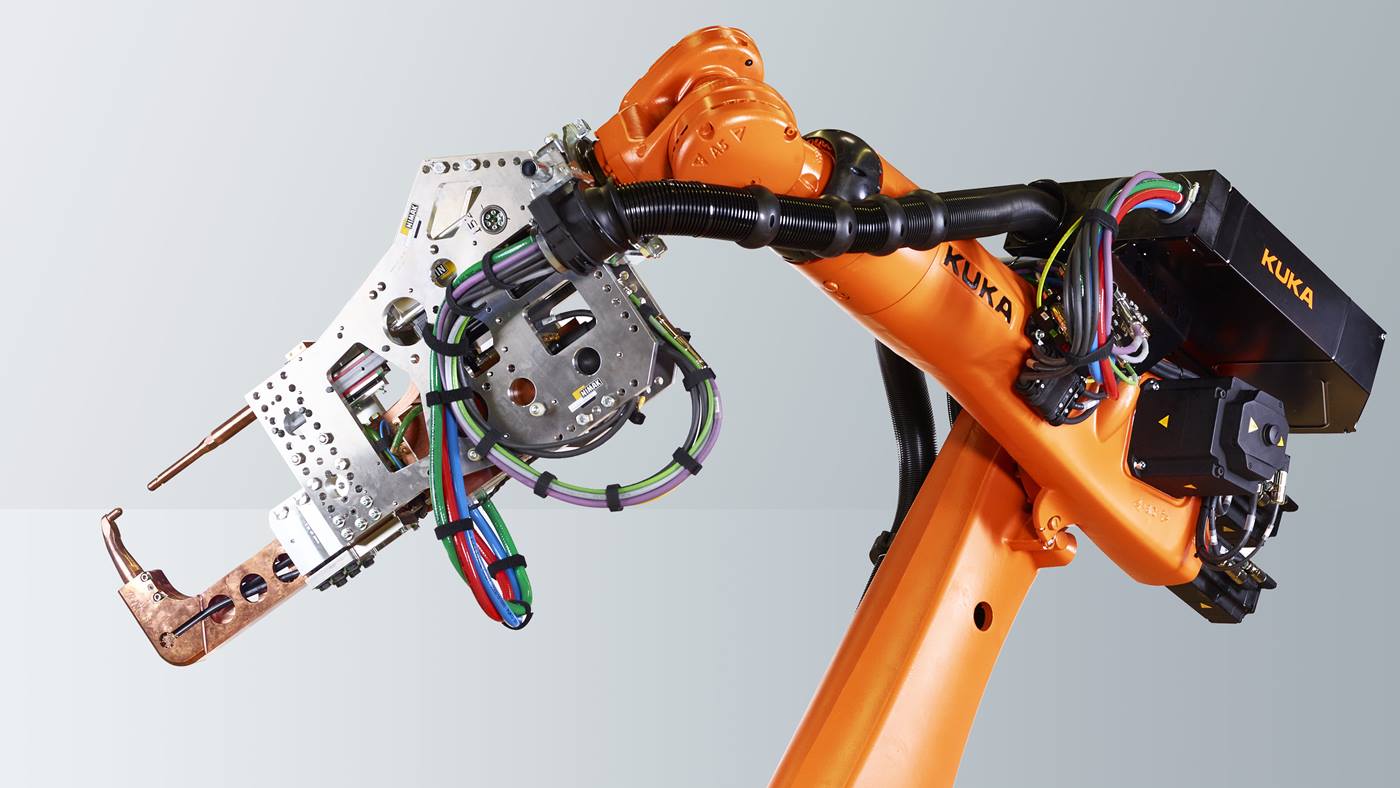
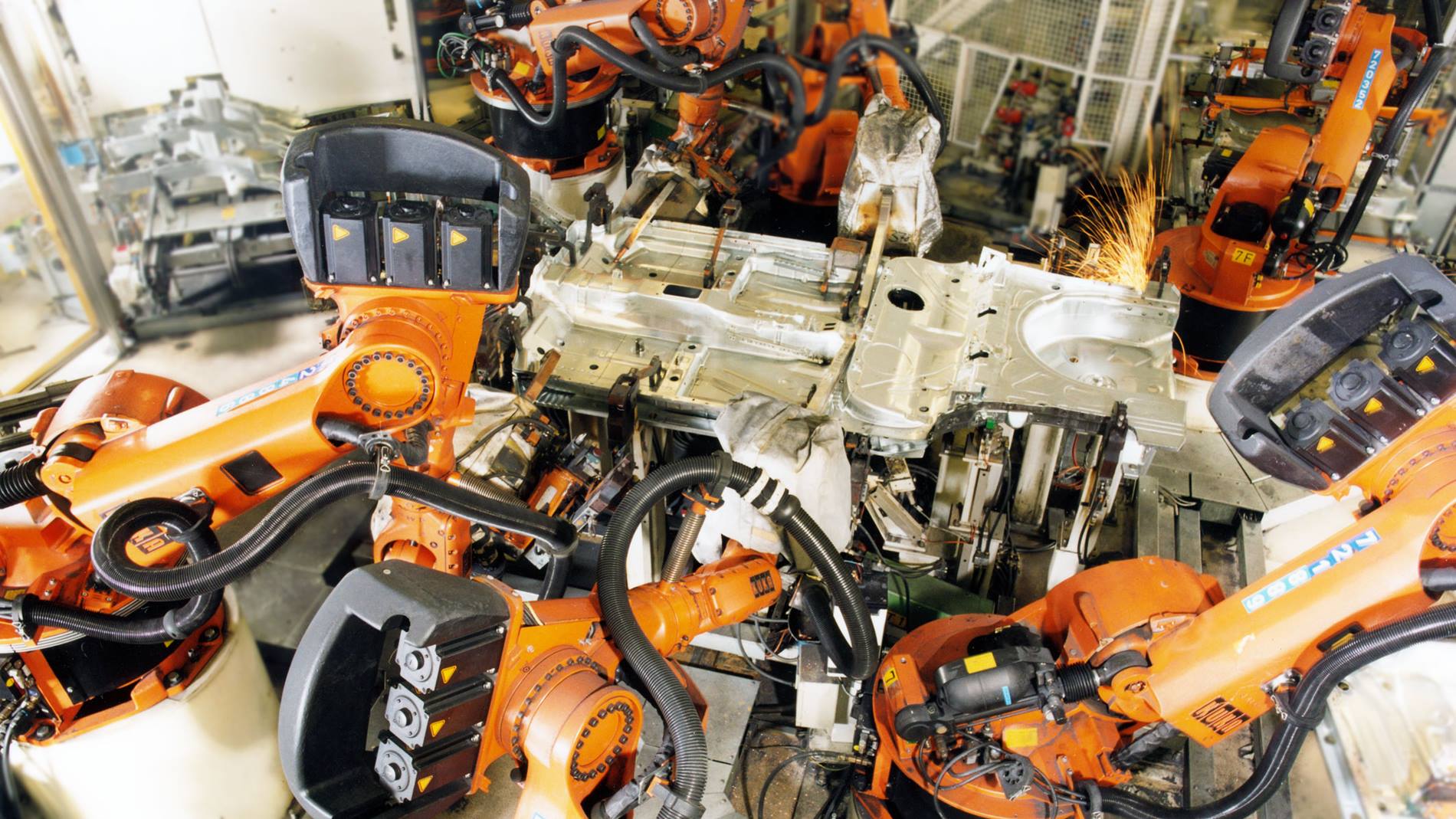
机器人系统可以用 KUKA.Gripper&SpotTech 4.0 控制和监控其工作环境中的工具和抓爪。具体的应用领域为材料处理和使用气动焊钳的点焊。可以非常快速简单地对使用 KUKA 机器人的搬运任务进行编程。
用 KUKA.Gripper&SpotTech 软件可以减少调试时间,并简化问题的处理过程。它让您的机器人系统能够控制工作环境中的工具和抓爪。
机器人系统可以用 KUKA.Gripper&SpotTech 4.0 控制和监控其工作环境中的工具和抓爪。具体的应用领域为材料处理和使用气动焊钳的点焊。可以非常快速简单地对使用 KUKA 机器人的搬运任务进行编程。
KUKA.GripperSpotTech 4.0 是 GripperSpotTech 3.x 的后继产品,可以提供更加丰富的功能。由于这个原因,它与先前的版本并不兼容。