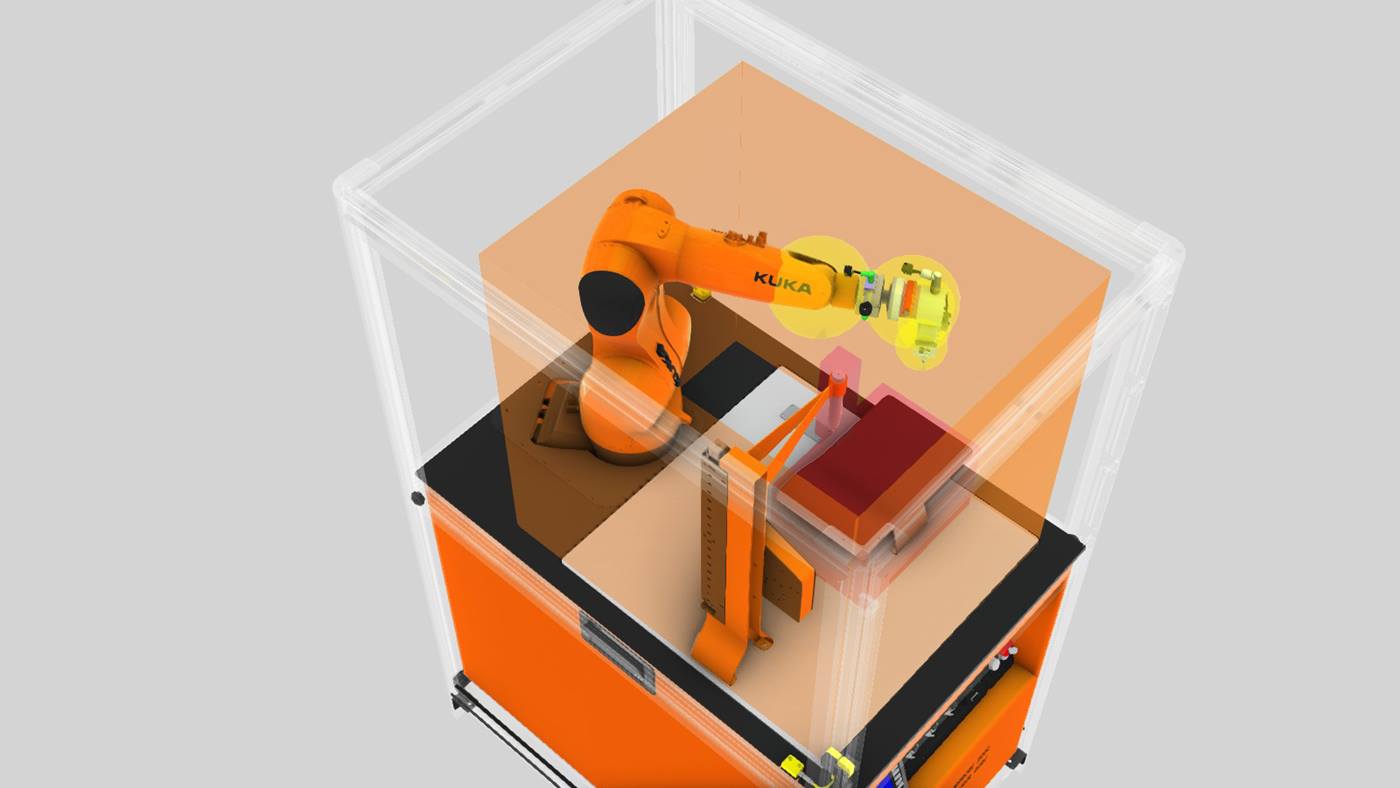
ห้องตรวจสอบที่มี KUKA.SafeOperation
จะมุ่งเน้นไปที่ความปลอดภัย ซอฟต์แวร์จะมอบสำหรับการลดลงอย่างปลอดภัยของห้องทำงานทางทฤษฎีไปจนถึง 16 ห้องตรวจสอบและหนึ่งพื้นที่เซลล์ที่กำหนดไว้อย่างแน่นอน – ความหมายของห้องตรวจสอบนี้จะเป็นการกำหนดพฤติกรรมของหุ่นยนต์
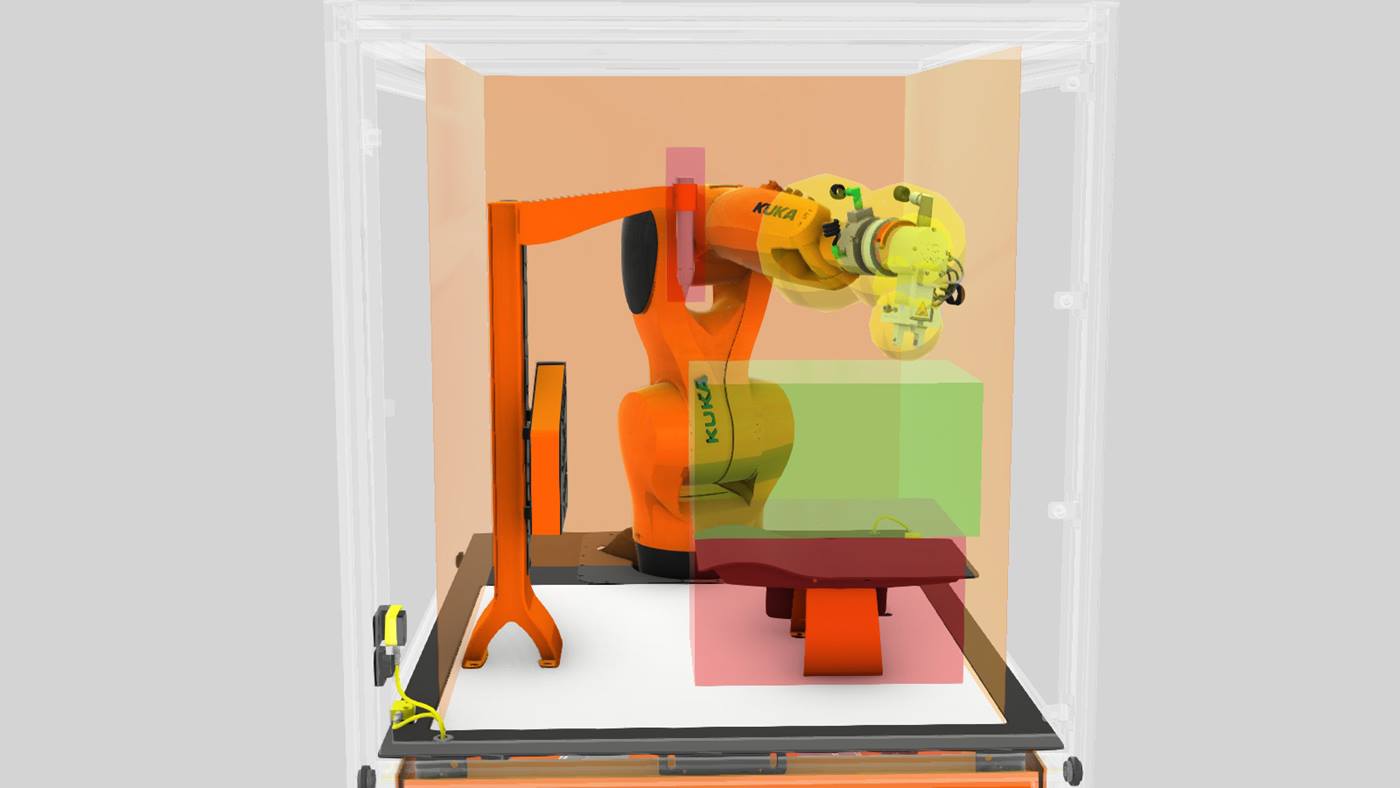
ทุก ๆ พื้นที่จะสามารถกำหนดไว้อย่างเฉพาะเจาะจงได้ ให้คุณเลือกระหว่าง ความหมายคาร์ทีเซียนหรือความหมายที่เฉพาะเจาะจงสำหรับแกน. ในการนี้มันจะมีแตกต่างกันระหว่างประเภทของห้องนี้:
- ห้องทำงาน
- ห้องป้องกัน
- ห้องป้องกัน การแจ้ง (ไม่หยุด)
- ห้องทำงาน การแจ้ง (ไม่หยุด)
- พื้นที่เซลล์ (ไม่สามารถสลับได้)