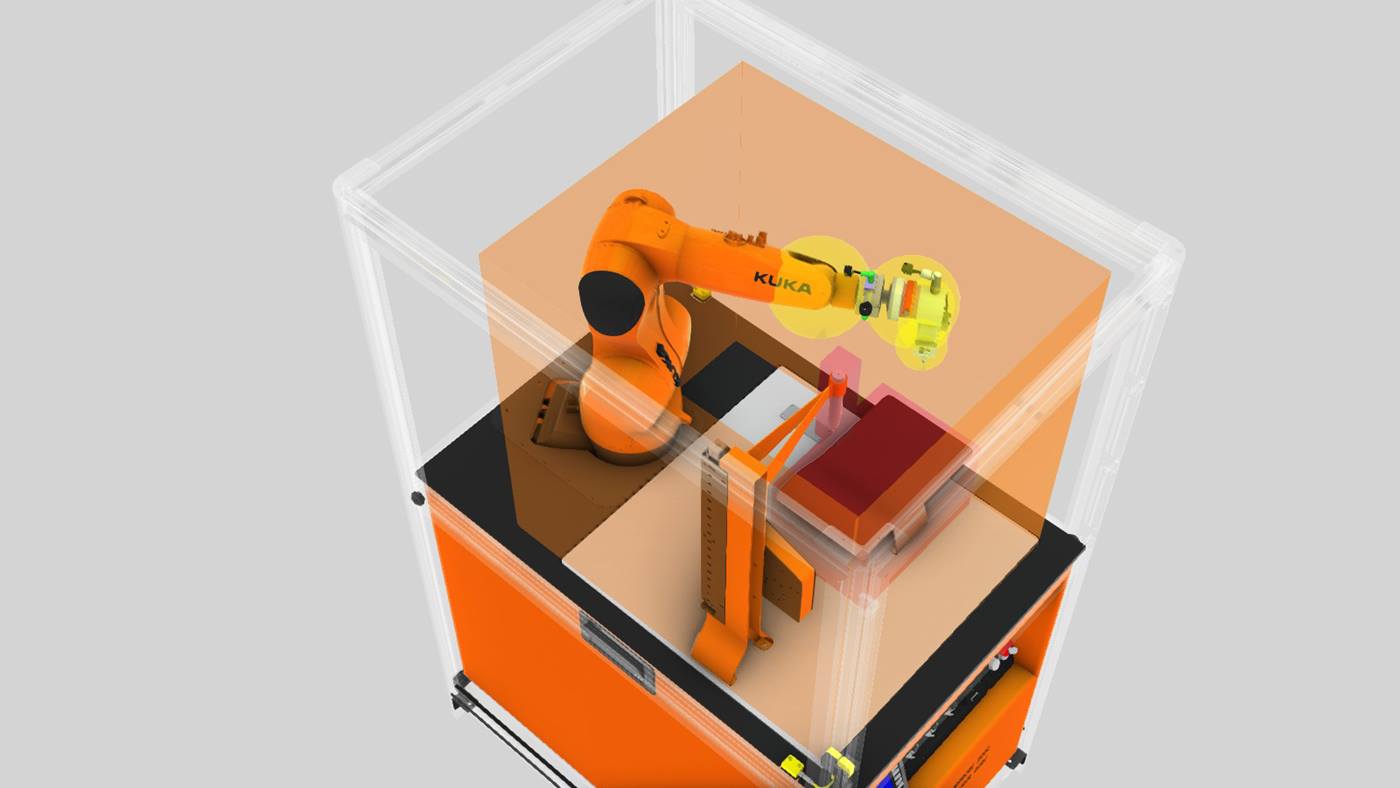
Spazi di controllo con KUKA.SafeOperation
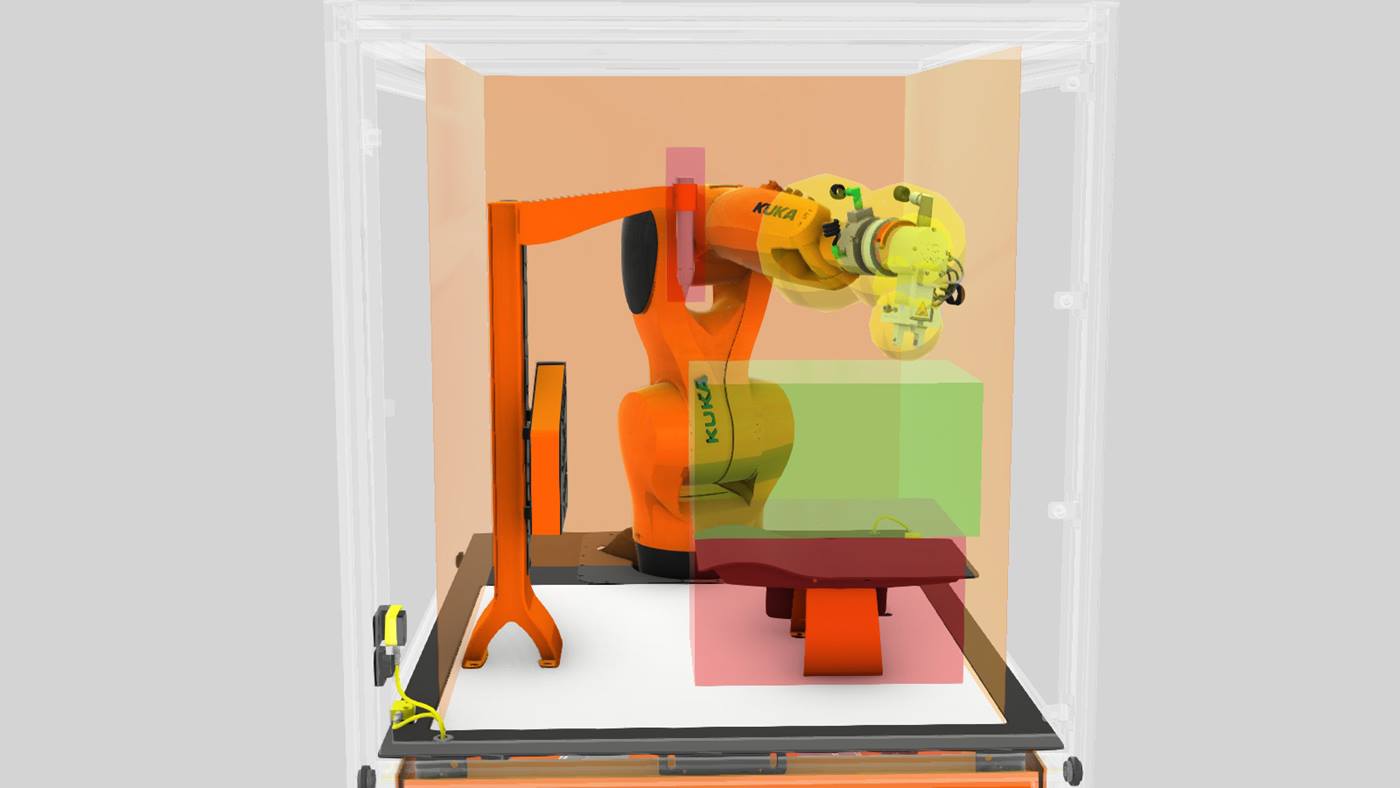
La sicurezza è al centro. Il software offre per la riduzione sicura dell’area di lavoro teorica fino a 16 zone di monitoraggio e un’area cella fissa: la definizione di questi spazi di controllo determina il comportamento del robot.
Ogni area può essere definita individualmente. Scegliete tra la definizione cartesiana e quella specifica per assi. Dovere inoltre distinguere tra questi tipi di spazi:
- Spazio di lavoro
- Zona protetta
- Messaggio zona protetta (non di arresto)
- Messaggio spazio di lavoro (non di arresto)
- Area cella (non commutabile)