ระบบ KUKA.SeamTech Tracking และ KUKA.SeamTech Finding
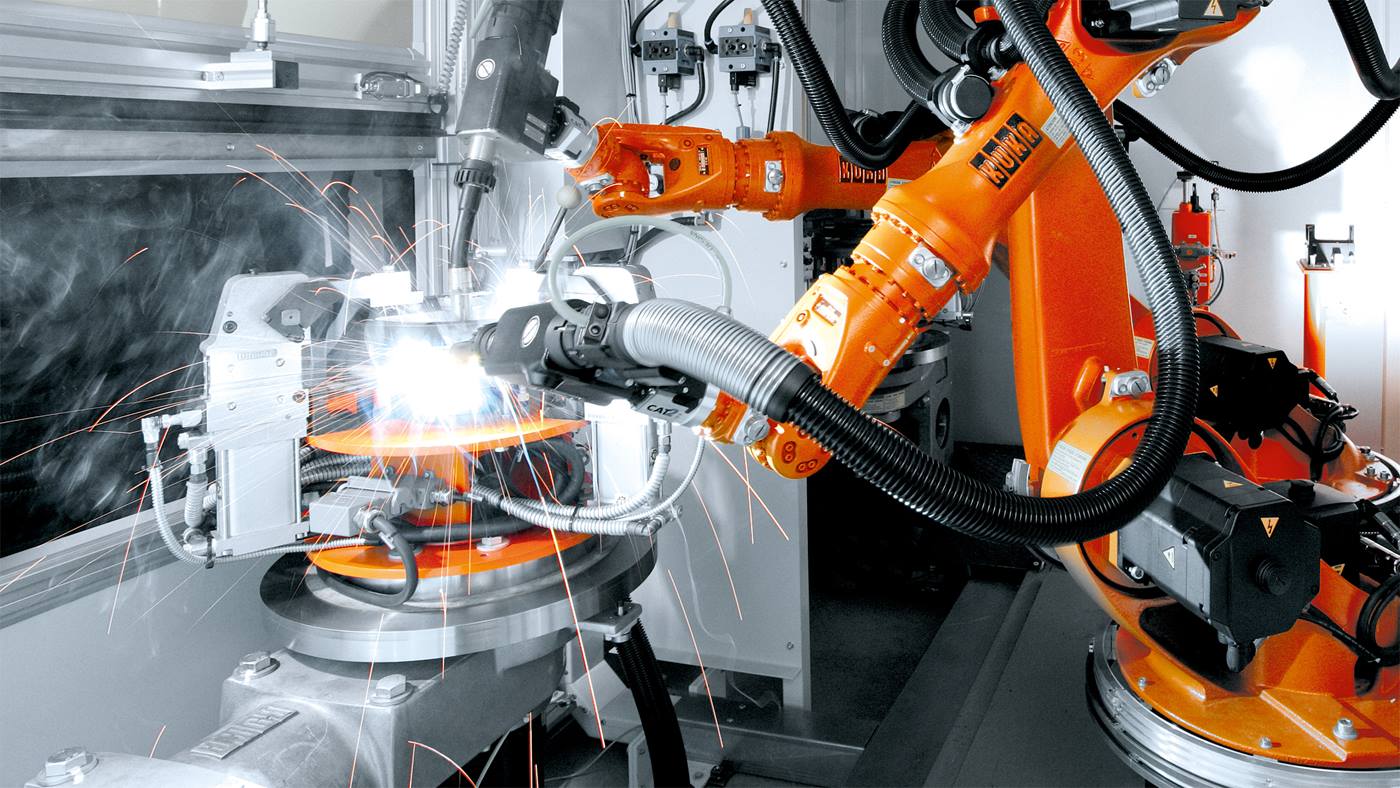
สามารถเลือกให้เพิ่มซอฟต์แวร์แอปพลิเคชั่น KUKA.SeamTech Tracking และ KUKA.SeamTech Finding เข้าในชุดควบคุมหุ่นยนต์ KR C4ได้ เลเซอร์เซ็นเซอร์สามเหลี่ยมระยะอัจฉริยะช่วยให้หุ่นยนต์สามารถดำเนินการค้นหาชิ้นส่วนและรอยต่อก่อนการเชื่อมได้ด้วยระบบ KUKA.SeamTech Finding และทำการติดตามระยะขอบหรือรอยต่อด้วยระบบ KUKA.SeamTech Tracking ในระหว่างการเชื่อม
ข้อดีของ KUKA.SeamTech
การสื่อสารอย่างราบรื่นระหว่างเซ็นเซอร์กับชุดควบคุม
KUKA.SeamTech Finding และ Tracking คือ ตัวเลือกสำหรับการควบคุมและการตั้งโปรแกรมเลเซอร์เซ็นเซอร์สามเหลี่ยมระยะอัจฉริยะผ่านทาง Ethernet โดยที่ SeamTech Tracking มีโปรโตคอลแบบเรียลไทม์ที่มีประสิทธิภาพ
การตั้งโปรแกรมง่ายด้วยตัวช่วยตั้งโปรแกรมของ KUKA
การตั้งโปรแกรมแอปพลิเคชั่นคำสั่งการใช้งานเซ็นเซอร์ของหุ่นยนต์จะทำงานตามปกติด้วยแบบฟอร์มอินไลน์ที่มีความชัดเจนและตั้งโปรแกรมได้อย่างรวดเร็ว นอกจากนั้น ยังมีปุ่มแสดงสถานะ ที่ช่วยให้สามารถใช้งานฟังก์ชั่นต่าง ๆ ของหุ่นยนต์และเซ็นเซอร์ได้อย่างรวดเร็ว
แพ็คเกจเทคโนโลยีที่สามารถรวมเข้าด้วยกันได้อย่างยืดหยุ่น
KUKA.SeamTech Finding และ Tracking คือ แพ็คเกจเทคโนโลยีอัตโนมัติ ที่สามารถรวมเข้ากับตัวเลือกอื่น ๆ ได้ อาทิเช่น ArcTech Basic, ArcTech Advanced, LaserTech หรือ GlueTech
KUKA.SeamTech Tracking
KUKA.SeamTech Tracking สามารถใช้ในการติดตามขอบและตะเข็บได้โดยใช้เซ็นเซอร์จากผู้ผลิต SERVO-ROBOT Inc, Scansonic MI GmbH, BavariQ Sensor GmbH & Co. KG หรือ wenglor sensoric GmbH สามารถเชื่อมต่อระบบเซ็นเซอร์จากบริษัทอื่นที่สื่อสารผ่านอีเทอร์เน็ตและโปรโตคอล XML ได้เช่นกัน ผู้ใช้สามารถเพิ่มสิ่งเหล่านี้ลงใน WorkVisual ด้วยโปรโตคอลอินเทอร์เฟซที่ปรับให้เหมาะกับเซ็นเซอร์ ด้วยอินเทอร์เฟซอีเทอร์เน็ตแบบเรียลไทม์ที่ทรงพลังเป็นพิเศษของ KUKA ระบบเซ็นเซอร์จึงสามารถดำเนินการแก้ไขเส้นทางของหุ่นยนต์ที่มีความแม่นยำสูงได้อย่างง่ายดาย ไม่เพียงแต่ที่ความเร็วการเชื่อม MIG/MAG และ TIG ทั่วไปเท่านั้น แต่ยังรวมถึงความเร็วสูงมากที่ใช้ในการเชื่อมด้วยเลเซอร์ด้วย
สามารถตั้งโปรแกรมการติดตามรอยต่อให้เหมาะกับแอปพลิเคชั่นการเชื่อมแต่ละตัวได้ผ่านทางแบบฟอร์มอินไลน์อัตโนมัติ เช่น การขนส่งอย่างรวดเร็วหรือด้วยการหยุดที่แม่นยำ นอกจากนั้น SeamTech Tracking ยังมีคำสั่งพิเศษสำหรับการค้นหาจุดเริ่มต้นรอยต่อและจุดสิ้นสุดรอยต่อแบบไดนามิกอีกด้วย หุ่นยนต์จึงสามารถปรับตำแหน่งและความยาวของรอยต่อในการเชื่อมให้เหมาะกับชิ้นส่วนที่จะเชื่อมได้โดยอัตโนมัติ
KUKA.SeamTech Finding
KUKA.SeamTech Finding สามารถใช้ควบคุมเซ็นเซอร์จากโรงงานผลิต SERVO-ROBOT Inc, Scansonic MI GmbH, BavariQ Sensor GmbH & Co. KG หรือ wenglor sensoric GmbH สามารถเชื่อมต่อระบบเซ็นเซอร์จากบริษัทอื่นที่สื่อสารผ่านอีเทอร์เน็ตและโปรโตคอล XML ได้เช่นกัน ผู้ใช้สามารถเพิ่มสิ่งเหล่านี้ลงใน WorkVisual ได้ด้วยโปรโตคอลอินเทอร์เฟซที่ปรับเปลี่ยนตามเซ็นเซอร์ ข้อได้เปรียบที่ยอดเยี่ยมของการตรวจจับส่วนประกอบและตะเข็บโดยใช้เซนเซอร์เลเซอร์เส้นอัจฉริยะคือสามารถเก็บข้อมูลเรขาคณิตของส่วนประกอบหลายรายการในการวัดครั้งเดียว
รูปทรงเรขาคณิตของชิ้นส่วนที่ได้รับการบันทึกช่วยให้ซอฟต์แวร์ KUKA.SeamTech Finding สามารถคำนวณค่าการผลักดันและ/หรือการบิดหมุนของชิ้นส่วน ของรอยต่อหรือของจุดบนรางแต่ละจุดได้เร็วที่สุด การคำนวณดังกล่าวช่วยให้ตัวตั้งโปรแกรมสามารถเริ่มและหยุดการทำงานการแก้ค่าที่เป็นไปได้ถึง 6 มิติ ในโปรแกรมของหุ่นยนต์ได้อย่างยืดหยุ่น ด้วยวิธีการดังกล่าว จึงสามารถทำการดัดแปลงแก้ไขชิ้นส่วนได้อย่างเหมาะสมและตรงตามกระบวนการ