KUKA.SeamTech Tracking i KUKA.SeamTech Finding
Oprogramowanie aplikacyjne KUKA.SeamTech Tracking oraz KUKA.SeamTech Finding można opcjonalnie dołączyć do układu sterowania robota KR C4. Dzięki inteligentnemu czujnikowi triangulacyjnemu robot wyposażony w KUKA.SeamTech Finding wykonuje wyszukiwanie podzespołów i spoin przed spawaniem, natomiast robot wyposażony w KUKA.SeamTech Tracking wykonuje kontrolę krawędzi i spoin podczas spawania.
Zalety KUKA.SeamTech
Bezproblemowa komunikacja między czujnikiem a układem sterowania
KUKA.SeamTech Finding i Tracking to opcje przeznaczone do sterowania i programowania inteligentnych czujników triangulacyjnych za pośrednictwem Ethernet – w przypadku SeamTech Tracking nawet w połączeniu z wydajnym protokołem w czasie rzeczywistym.
Łatwe programowanie dzięki programom pomocniczym KUKA
Programowanie aplikacji zgodnie z poleceniami czujników robota odbywa się w standardowy sposób za pomocą przejrzystych i szybko programowalnych formularzy. Pomocne są przy tym również klawisze stanu, które umożliwiają szybką obsługę funkcji robota i czujników.
Elastyczne kombinacje pakietów technologicznych
KUKA.SeamTech Finding i Tracking to samodzielne pakiety technologiczne, które można łączyć z innymi opcjami, takimi jak ArcTech Basic, ArcTech Advanced, LaserTech lub GlueTech.
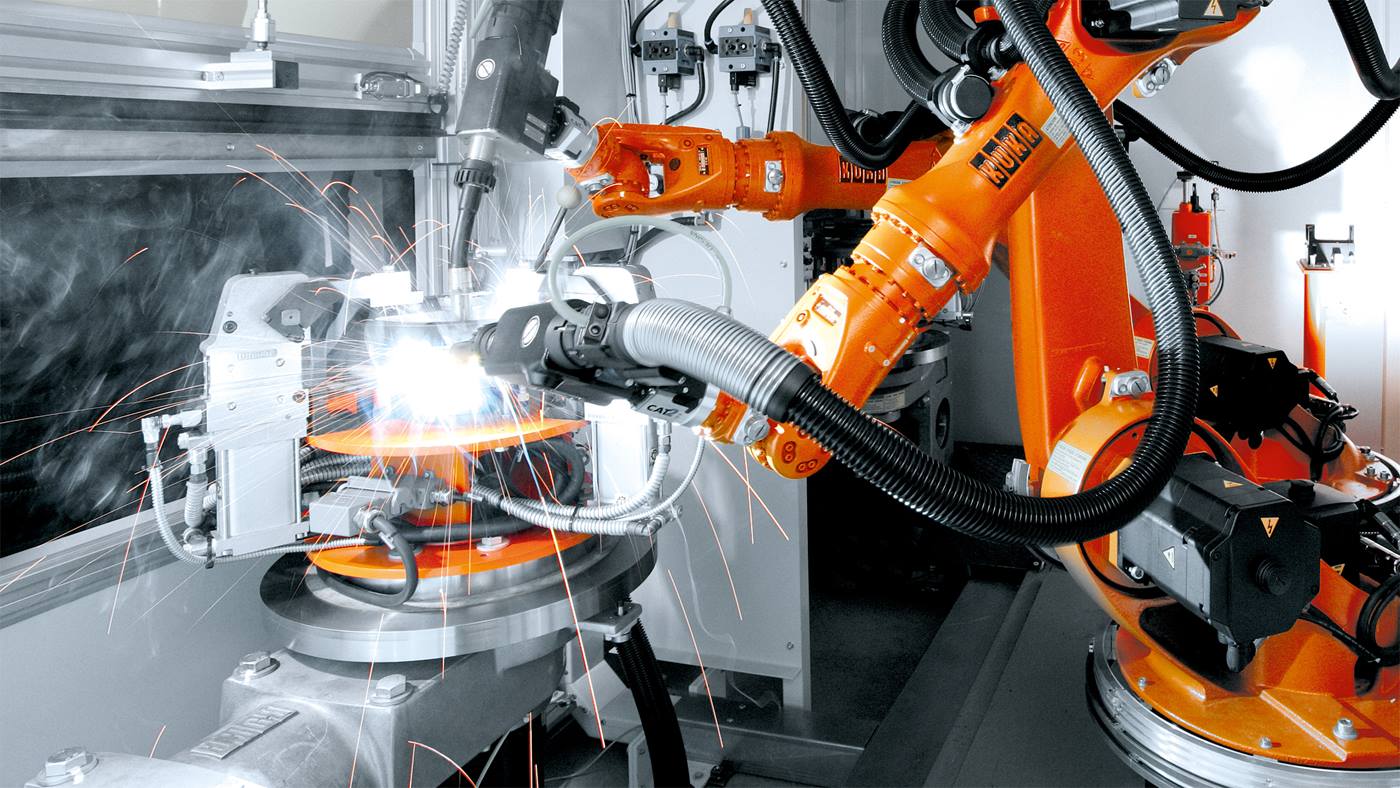
KUKA.SeamTech Tracking
KUKA.SeamTech Tracking może być używany do śledzenia krawędzi i spoin za pomocą czujnika od producentów SERVO-ROBOT Inc, Scansonic MI GmbH, BavariQ Sensor GmbH & Co. KG lub wenglor sensoric GmbH. Można również podłączyć systemy czujników innych firm, które komunikują się przez Ethernet i protokół XML. Mogą one zostać dodane do WorkVisual przez użytkownika za pomocą protokołu interfejsu dostosowanego do czujnika. Ze względu na bardzo wydajny interfejs Ethernet firmy KUKA działający w czasie rzeczywistym system czujników może bez problemów wykonać bardzo dokładną korektę toru robota, zarówno przy prędkościach spawania typowych dla metody MIG/MAG i WIG, jak również przy bardzo wysokich prędkości spawania laserowego.
Wyszukiwanie spoin można zaprogramować za pomocą niezależnych formularzy, pasujących do każdej aplikacji spawalniczej, np. latających lub z zatrzymaniem dokładnym. Poza tym SeamTech Tracking zawiera również specjalne komendy do dynamicznego wyszukiwania początku i końca spoiny. W ten sposób robot może samodzielnie dopasować pozycję i długość spoiny do spawanego podzespołu.
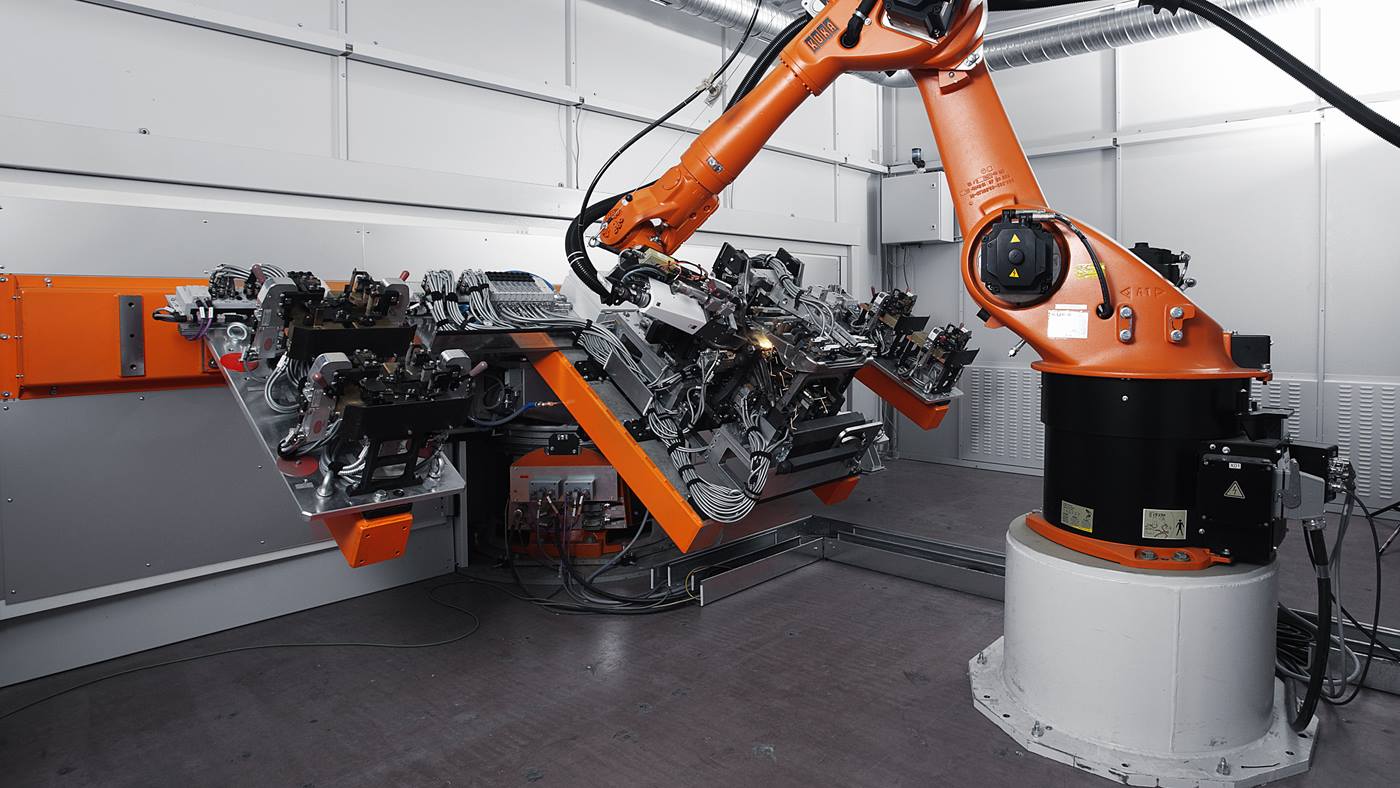
KUKA.SeamTech Finding
KUKA.SeamTech Finding może być używany do obsługi czujników producentów SERVO-ROBOT Inc, Scansonic MI GmbH, BavariQ Sensor GmbH & Co. KG lub wenglor sensoric GmbH. Można również podłączyć systemy czujników innych firm, które komunikują się przez Ethernet i protokół XML. Mogą one zostać dodane do WorkVisual przez użytkownika za pomocą protokołu interfejsu dostosowanego do czujnika. Dużą zaletą wyszukiwania podzespołów i spoin za pomocą inteligentnych czujników lasera liniowego jest to, że podczas pomiaru mogą one zarejestrować więcej informacji o geometrii podzespołu.
W oparciu o zarejestrowaną geometrię podzespołu oprogramowanie KUKA.SeamTech Finding może szybko obliczyć przesunięcie lub obrót podzespołu, spoiny albo pojedynczych punktów na torze. Na podstawie tych obliczeń programista może w sposób elastyczny dezaktywować i aktywować korekty w programie robota, które mogą mieć do 6D. Umożliwia to optymalną i bezpieczną dla procesu obróbkę podzespołu.