หุ่นยนต์ของ KUKA ผลิตแจ็คสกรูระดับพรีเมี่ยมโดยอัตโนมัติ
ไม่ว่าจะทำงานภายใต้แพลตฟอร์มการยกในอู่ซ่อมรถยนต์หรือเชื่อมความแตกต่างของความสูงที่พบในระบบสายพานอุตสาหกรรม - แจ็คสกรูของผู้ผลิต ZIMM มักจะถูกนำมาใช้งานได้โดยไม่เป็นที่สังเกต อย่างไรก็ตาม การผลิตเเจ็คสกรูที่สำนักงานใหญ่ของบริษัท นั้นเป็นที่ดึงดูดสายตาอย่างแท้จริง: เครื่องกัดห้าแกนจากผู้ผลิต GROB ทำให้มั่นใจได้ว่าได้ผลิตส่วนประกอบซึ่งทำจากอลูมิเนียมและก้อนเหล็กหล่อในขนาดต่าง ๆ ได้อย่างแม่นยำ เครื่องมือกลเป็นส่วนหนึ่งของเซลล์การผลิตแบบแยกส่วน ซึ่งภายในมีหุ่นยนต์สำหรับการโหลดจาก KUKA ที่มีหน้าที่ในการโหลดเครื่องกัดโดยอัตโนมัติและ KR AGILUS จะเข้าควบคุมกระบวนการตกแต่งชิ้นงานโดยอัตโนมัติ
หุ่นยนต์จะโหลดเครื่องกัดและเข้าควบคุมการตกแต่งชิ้นงานโดยอัตโนมัติ
Marcel Haltiner หัวหน้าฝ่ายระบบอัตโนมัติของ
Vischer & Bolli GmbH อธิบายว่า “จนถึงตอนนี้ส่วนใหญ่แล้วชิ้นงานจะถูกจับยึดบนพาเลทด้วยมือ” “ใช้เวลานานและมีราคาแพง” เพื่อให้การผลิตของ ZIMM มีประสิทธิภาพมากขึ้นและทำให้มีประสิทธิผลมากขึ้นในเวลาเดียวกัน บริษัท Vischer & Bolli และ
HBI Robotics ได้ร่วมกันพัฒนาเซลล์หุ่นยนต์แบบแยกส่วนที่ติดตั้งด้วย KR QUANTEC หนึ่งตัวและ KR AGILUS จาก KUKA อีกหนึ่งตัว
หุ่นยนต์จะโหลดเครื่องกัดแบบห้าแกนและเข้าควบคุมการตกแต่งชิ้นงานโดยอัตโนมัติ รวมไปถึงการปล่อยออกของชิ้นส่วนเกียร์สำเร็จรูป
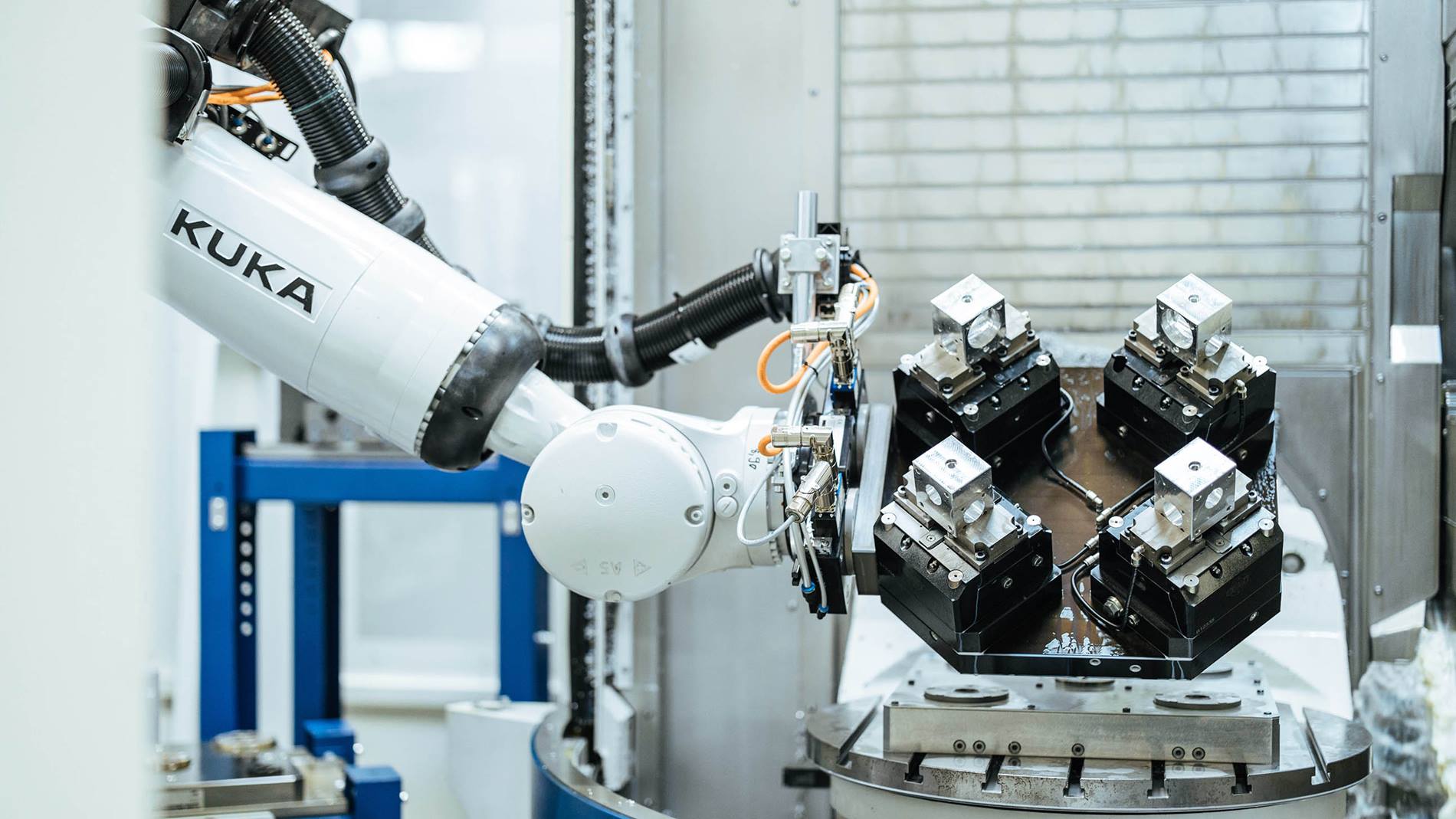
 เครื่องกลผู้ช่วย: KR QUANTEC เป็นหุ่นยนต์โหลดในเซลล์อัตโนมัติ
เครื่องกลผู้ช่วย: KR QUANTEC เป็นหุ่นยนต์โหลดในเซลล์อัตโนมัติ
หุ่นยนต์โหลดและเซลล์การผลิตเพิ่มผลผลิตและประสิทธิภาพ
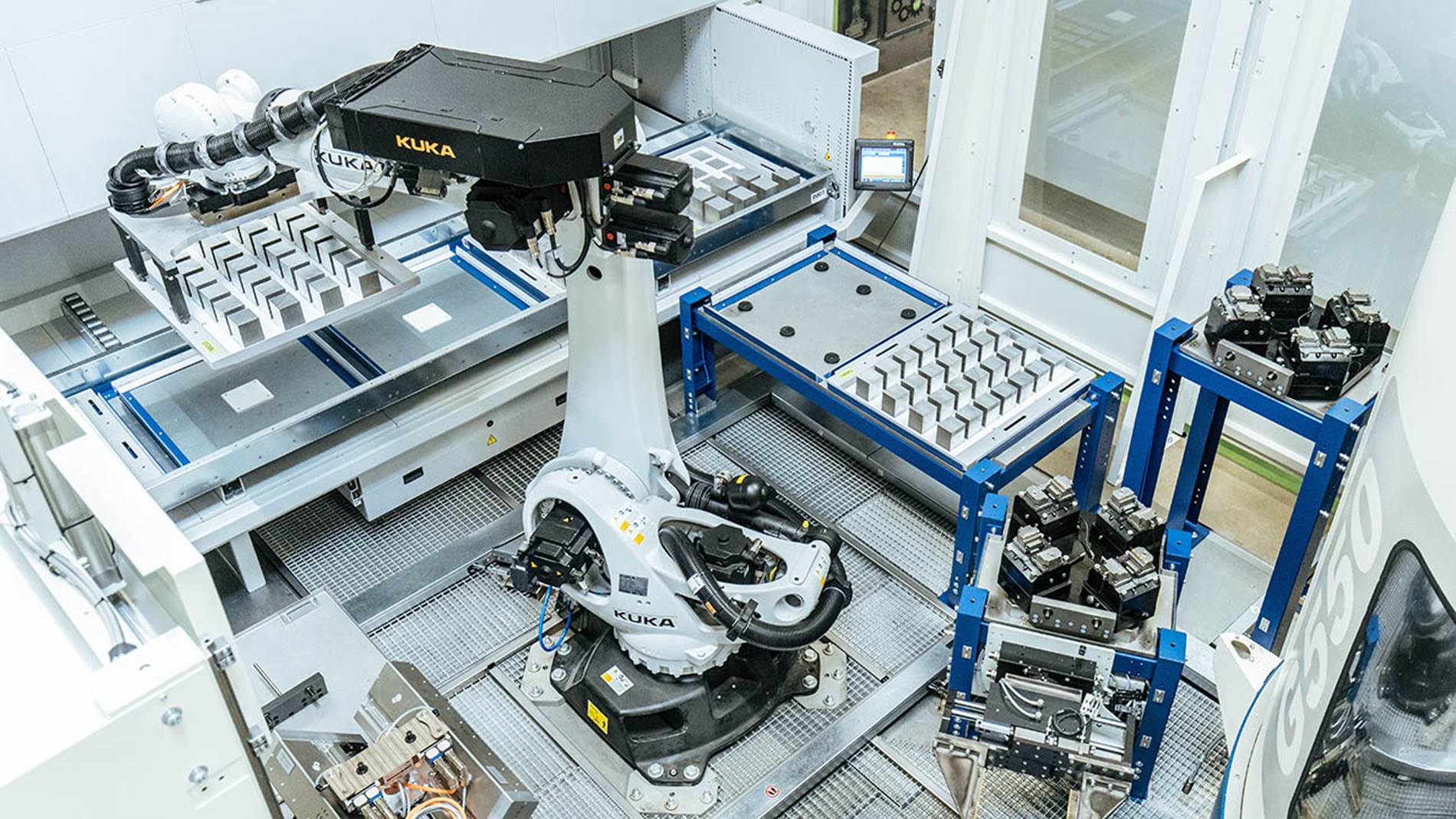
แทนที่จะโหลดพาเลทเครื่องจักรด้วยตนเองเหมือนก่อนหน้านี้ ณ ตอนนี้พนักงานทำการโหลดถาดภายในระบบยก ในหอสูงสี่เมตร มีวัตถุดิบและผลิตภัณฑ์สำเร็จรูป อุปกรณ์จับยึด และเครื่องมือเก็บอยู่ จากนั้นการทำงานของเซลล์หุ่นยนต์ที่เชื่อมต่อจะเริ่มขึ้น ในขั้นแรก
หุ่นยนต์ KR QUANTEC รุ่น KR 240 R2900 ultra จะนำถาดที่บรรจุชิ้นส่วนวัตถุดิบออกจากระบบยกและวางลงบนโต๊ะด้านหน้า
จากนั้นหุ่นยนต์จะทำการจัดตำแหน่งวัตถุดิบสี่ชิ้นในอุปกรณ์จับยึดหนึ่งโดยอัตโนมัติและวางลงในเครื่องกัด
 วัตถุดิบเข้า ชิ้นงานสำเร็จรูปออก: พนักงานจาก ZIMM จะติดถาดในระบบยก
วัตถุดิบเข้า ชิ้นงานสำเร็จรูปออก: พนักงานจาก ZIMM จะติดถาดในระบบยก
เซลล์แบบแยกส่วนช่วยให้สามารถทำการผลิตอย่างคุ้มค่าด้วยขนาดล็อตหนึ่งหรือมากกว่า
“เครื่องจักรสามารถผลิตชิ้นส่วนประกอบต่าง ๆ ได้ประมาณ 30 ชิ้นในขนาดล็อตตั้งแต่ 1 ถึง 200 จากอลูมิเนียมและเหล็กหล่อ” Marcel Haltiner อธิบายเพิ่มเติม: “ด้วยการโหลดอุปกรณ์ภายนอกเครื่อง เราสามารถหลีกเลี่ยงการหยุดทำงานที่ไม่จำเป็นได้ ในการที่หุ่นยนต์จะทำการโหลดและนำเฉพาะอุปกรณ์ที่ถูกติดแล้วออกเท่านั้น เราสามารถทำให้กระบวนการทั้งหมดมีประสิทธิภาพมากยิ่งขึ้น”
ในขณะที่เครื่องกัดกำลังจัดการกับชิ้นงานสี่ชิ้น KR QUANTEC จะติดตั้งอุปกรณ์อื่นต่อไป
หากส่วนประกอบเสร็จสิ้นทั้งสองด้าน - กระบวนการกลึงจะดำเนินการโดยอัตโนมัติ - หุ่นยนต์จะวางชิ้นส่วนเหล่านั้นบนสถานีการตกแต่งชิ้นงานในเซลล์ ที่นั่น KR AGILUS รุ่น KR 10 R900-2 จะทำการลบคมและทำความสะอาดชิ้นส่วนเหล่านี้
การทำงานโดยไร้บุคลากรช่วยเพิ่มความสามารถในการแข่งขัน
เมื่อชิ้นส่วนผ่านขั้นตอนทั้งหมดแล้ว หุ่นยนต์ KUKA จะทำการจำแนกชิ้นส่วนเหล่านี้กลับเข้าที่บนถาด ซึ่งจะถูกวางไว้ในระบบยกในขั้นต่อไป พนักงานจะนำผลิตภัณฑ์สำเร็จรูปออกในด้านอีกด้านหนึ่ง สำหรับ ZIMM เซลล์หุ่นยนต์มีความหมายต่อการพัฒนากระบวนการผลิตต่อไปอย่างมหาศาล “เหนือสิ่งอื่นใด ระบบอัตโนมัติช่วยให้เราสามารถทำการผลิตได้โดยอัตโนมัติในช่วงเวลากลางคืนซึ่งไม่มีบุคลากรและช่วงวันหยุดสุดสัปดาห์ ซึ่งจะเพิ่มผลผลิตและความสามารถในการแข่งขันของเรา” Hardy Ponudic หัวหน้าฝ่ายผลิตที่ ZIMM กล่าว
 KR AGILUS จาก KUKA ดูแลการตกแต่งชิ้นงานโดยอัตโนมัติ
KR AGILUS จาก KUKA ดูแลการตกแต่งชิ้นงานโดยอัตโนมัติ
หุ่นยนต์ทำการโหลดเครื่องกัด พนักงานจะใช้เวลาของพวกเขาในกิจกรรมอื่น ๆ
ซึ่งก่อนหน้านี้ต้องใช้บุคลากรและเวลาจำนวนมากในการทำกระบวนการดังกล่าวด้วยมือ ในตอนนี้กระบวนการนี้ถูกทำแทนโดยหุ่นยนต์ในเซลล์ เนื่องจากการขาดแคลนแรงงานที่มีทักษะจึงเป็นเรื่องยากมากขึ้นที่ ZIMM จะหาพนักงานที่ผ่านคุณสมบัติ ระบบอัตโนมัติช่วยทำให้พนักงานที่เคยติดตั้งแม็กกาซีนเครื่องกัดมาเป็นหลัก สามารถทำงานในด้านอื่น ๆ ที่พวกเขาสามารถมุ่งเน้นกิจกรรมการเพิ่มมูลค่าได้ Marcel Haltiner กล่าวว่า “โซลูชันของเราดำเนินงานได้โดยส่วนใหญ่แล้วไม่ต้องดำเนินการใด ๆ เพิ่มเติมและแบ่งเบาภาระงานเล็ก ๆ น้อย ๆ ของพนักงานได้ เช่นงานจับและคลายชิ้นงาน”
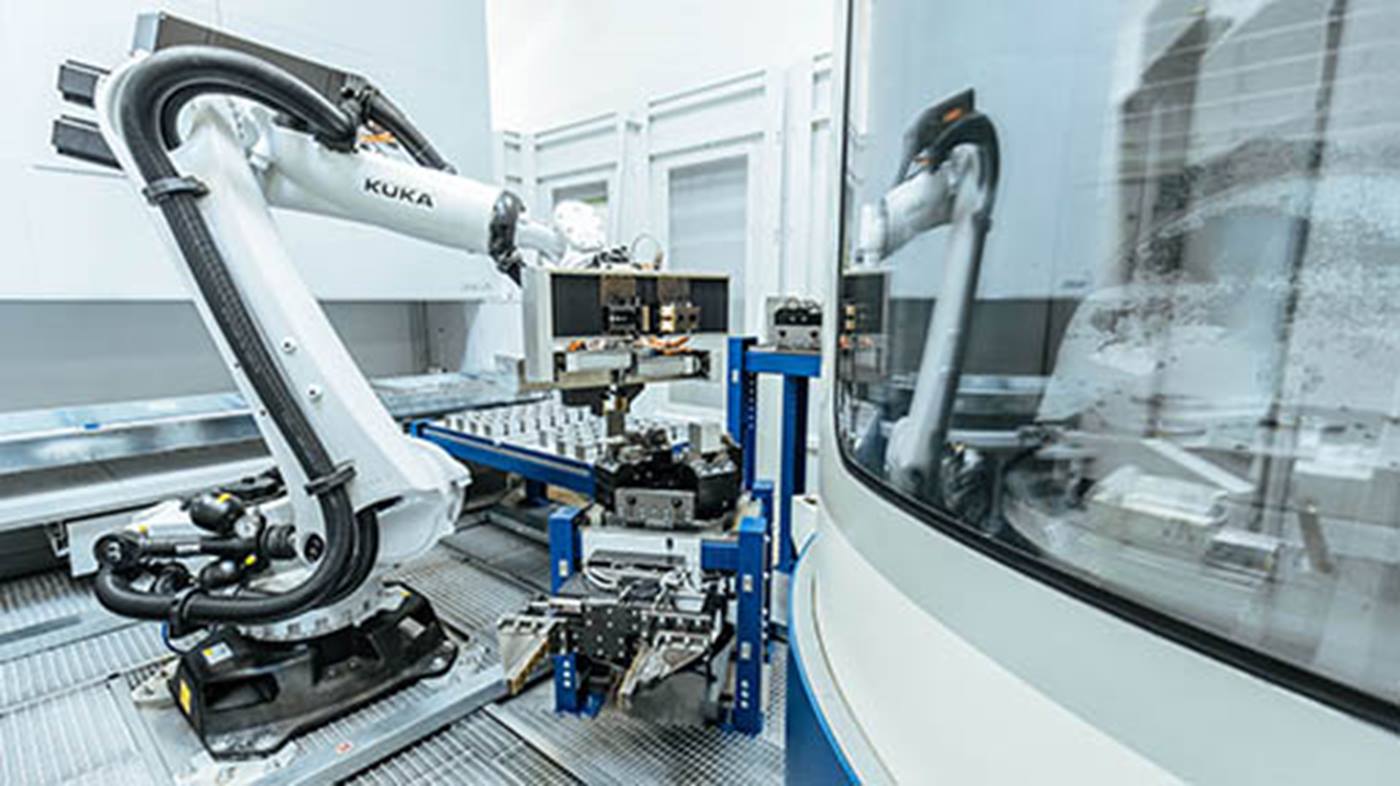
 หลังการตกแต่งอัตโนมัติ หุ่นยนต์โหลด KR QUANTEC จาก KUKA จะนำชิ้นงานกลับมาอยู่ในลิฟต์ยกวัสดุ
หลังการตกแต่งอัตโนมัติ หุ่นยนต์โหลด KR QUANTEC จาก KUKA จะนำชิ้นงานกลับมาอยู่ในลิฟต์ยกวัสดุ
ระบบคอมพิวเตอร์แม่ข่ายกลางกับความเป็นไปได้แบบไร้ขอบเขต
กระบวนการทั้งหมดภายในเซลล์ถูกควบคุมโดยคอมพิวเตอร์หลักซึ่งสามารถรวมเข้ากับระบบ ERP ได้ ตัวอย่างเช่น การทำหน้าที่ในการจัดการคำสั่งงานและการรวมประสานชิ้นงาน ควบคุมอุปกรณ์ต่อพ่วง และให้ข้อมูลเกี่ยวกับกระบวนการที่ดำเนินอยู่และที่กำลังจะเกิดขึ้น ด้วยการสร้างเซลล์แบบแยกส่วน Haltiner มองเห็นความเป็นไปได้เกือบไม่จำกัดสำหรับการใช้งาน: “การสร้างเครื่องจักรและแม่พิมพ์ เทคนิคการแพทย์ ภาคยานยนต์ - โดยทั่วไปแล้วเราเปิดรับโอกาสเกี่ยวกับระบบอัติโนมัติ ให้กับทุกๆ บริษัทเครื่องจักรกล”