1. Uygulamanın Belirlenmesi
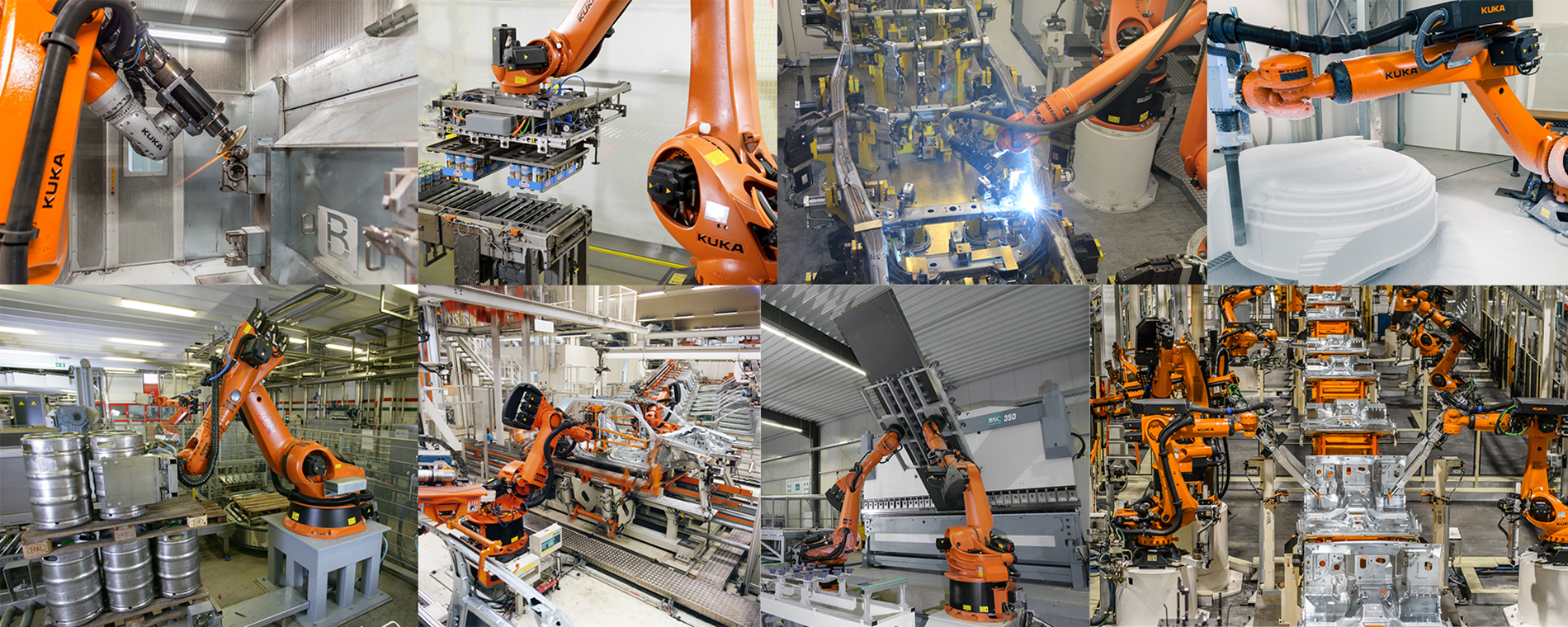
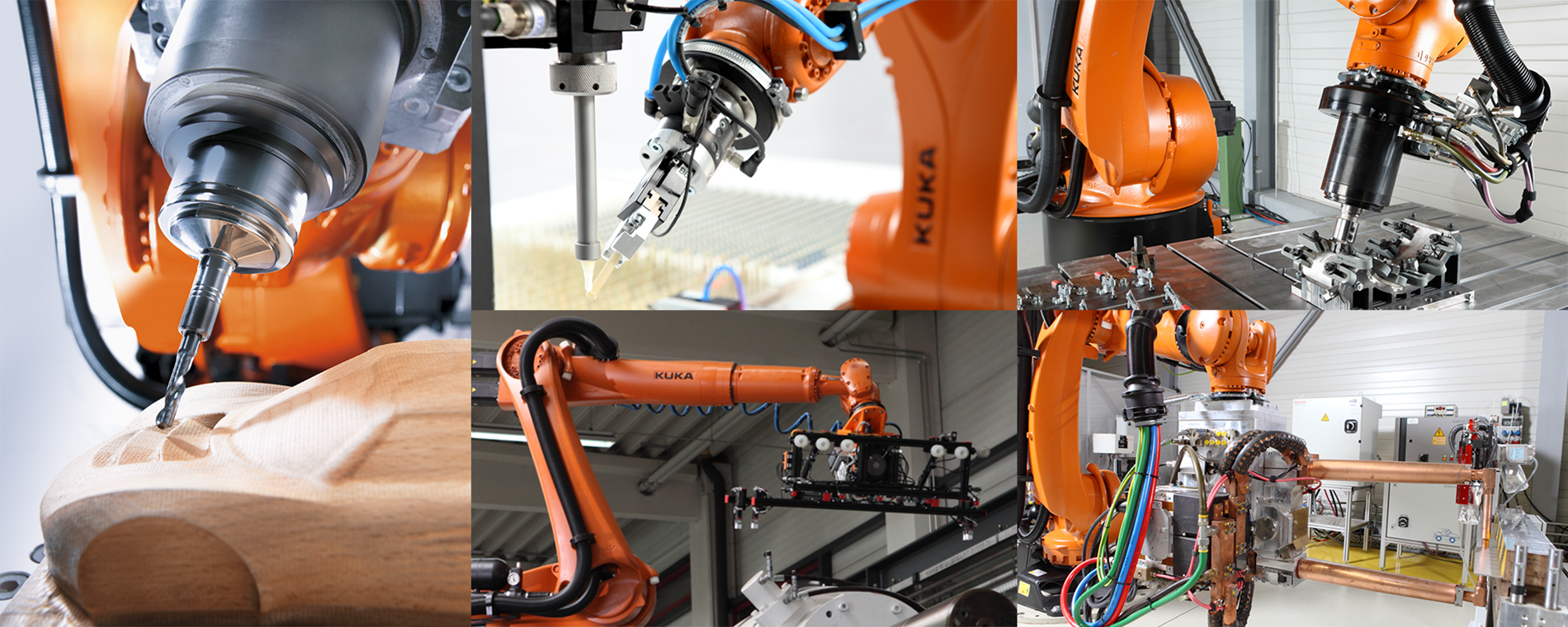
Robot seçiminde öncelikle uygulamanın ne olacağı belirlenmelidir. Aşağıda robot kullanılabilecek bazı uygulamaları bulabilirsiniz.
- Kaynak ve birleştirme (örneğin gazaltı kaynağı, punta kaynağı, lazer kaynağı gibi)
- Paketleme ve paletleme
- Montaj
- Taşıma
- Makine besleme ve boşaltma
- Boyama ve macunlama
- İşleme (frezeleme, trimleme, talaşlı imalat)
- Test & ölçüm