Eski sürüm Internet Explorer tarayıcısı kullanmaktasınız. En iyi gösterim için lütfen tarayıcınızı güncelleyin
6 Stages of Human-Robot Collaboration
While the recent move towards collaborative robots has created a lot of excitement, there's more to adopting a "cobot" than meets the eye.
Collaboration starts at the application
Thinking about purchasing a collaborative robot? While many are making the move, few realize that their application determines the level of collaboration with the operator and not the robot. Successful adoption depends on matching the right stage of Human-Robot Collaboration with your application. But how do you know which stage is right for you?
6 Stages of Human-Robot Collaboration
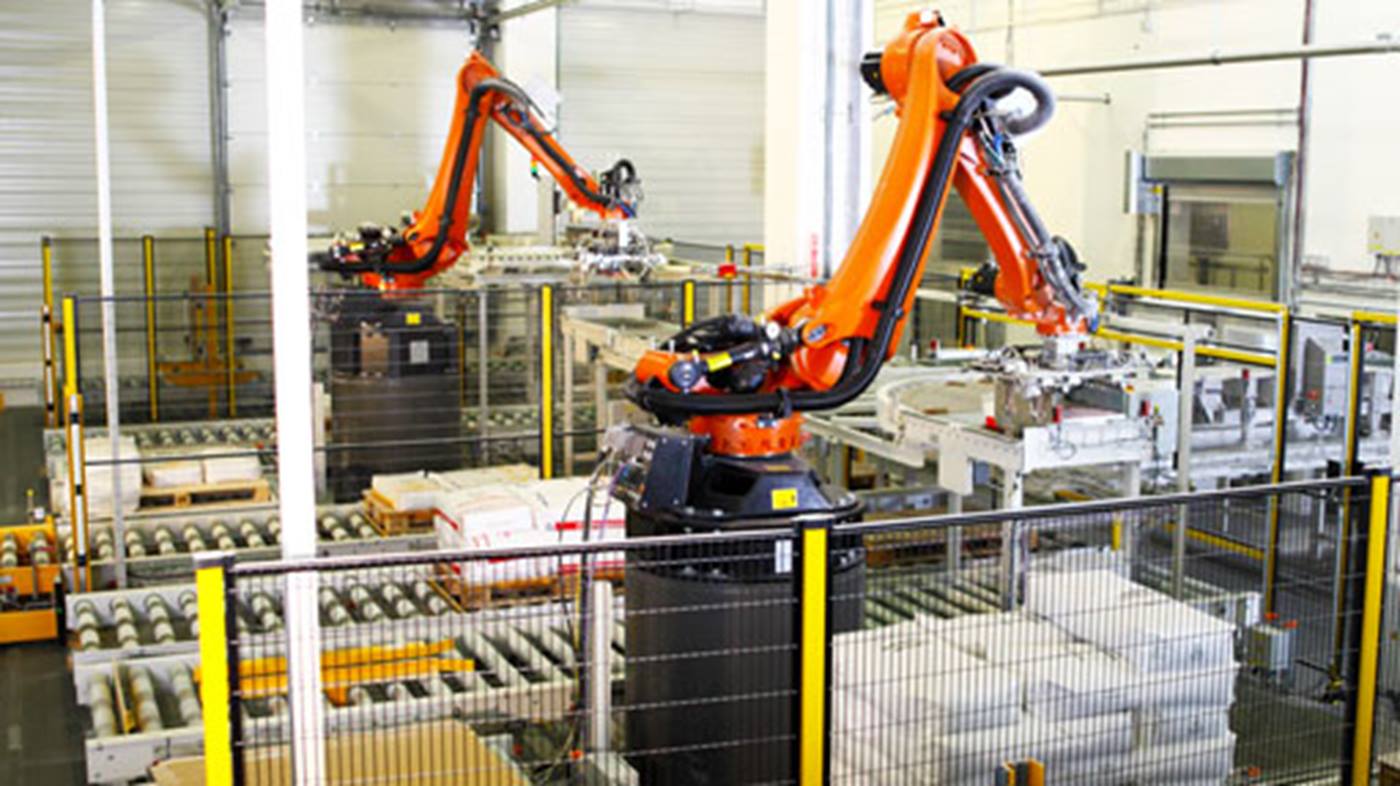
Stage 1 of HRC_Fixed Safety Fence
Classic configuration where hard guarding separates the operator from the robot
Eliminates contact
Majority of robot applications
Stage 2 of HRC_Laser (Virtual Guarding) Separation for Occasionally Shared Workspace
Occasionally shared workspace
Example: Refilling components or changing out pallets
Safety-rated monitored stop
Power stays on, but contact only possible with a stationary robot
Stage 3 of HRC_Virtual Guarding Separation for Frequently Shared Workspace
Intended shared workspace where intervention can be more frequent
Example: Operator manually loads and unloads parts in the work cell
Speed and separation monitoring where the robot slows more often
Contact is only possible with a stationary robot
The emphasis has become too much on the robot and less on the application, when in fact, it is the reverse that’s true.
Stage 4 of HRC_Shared Workspace with No Laser - Virtual Barrier
Robot and operator work next to each other, but not on the same part simultaneously
Example: Assembly line
Power and force limited robot that moves slowly and can be easily stopped on contact
Contact is possible, but not desired
Stage 5 of HRC_Robot and Operator Must Work Together to Complete Process
Robot and operator work on the same part simultaneously
Power and force limited robot that moves slowly
Contact is desired
Example: Hand-guiding for assembly
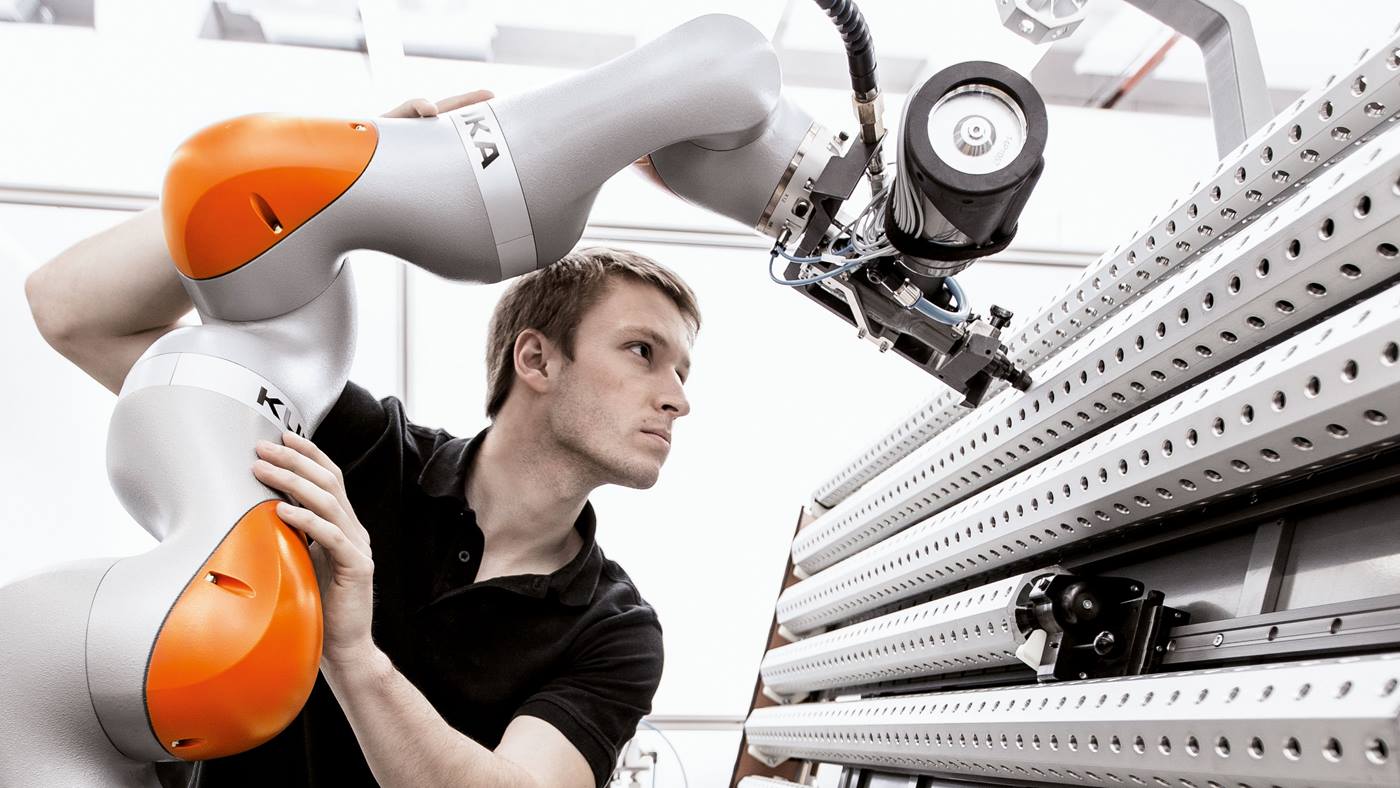
Stage 6 of HRC_Autonomous Collaborative Robot
Shared workspace where robot and human may move simultaneously
Contact possible, but not desired
Frees collaboration from what is now considered a fixed event
Robot is power and force limited and mobile platform has speed and separation monitoring
Still not sure which stage your application could be?
Get in touch with our experts to discuss all the details!