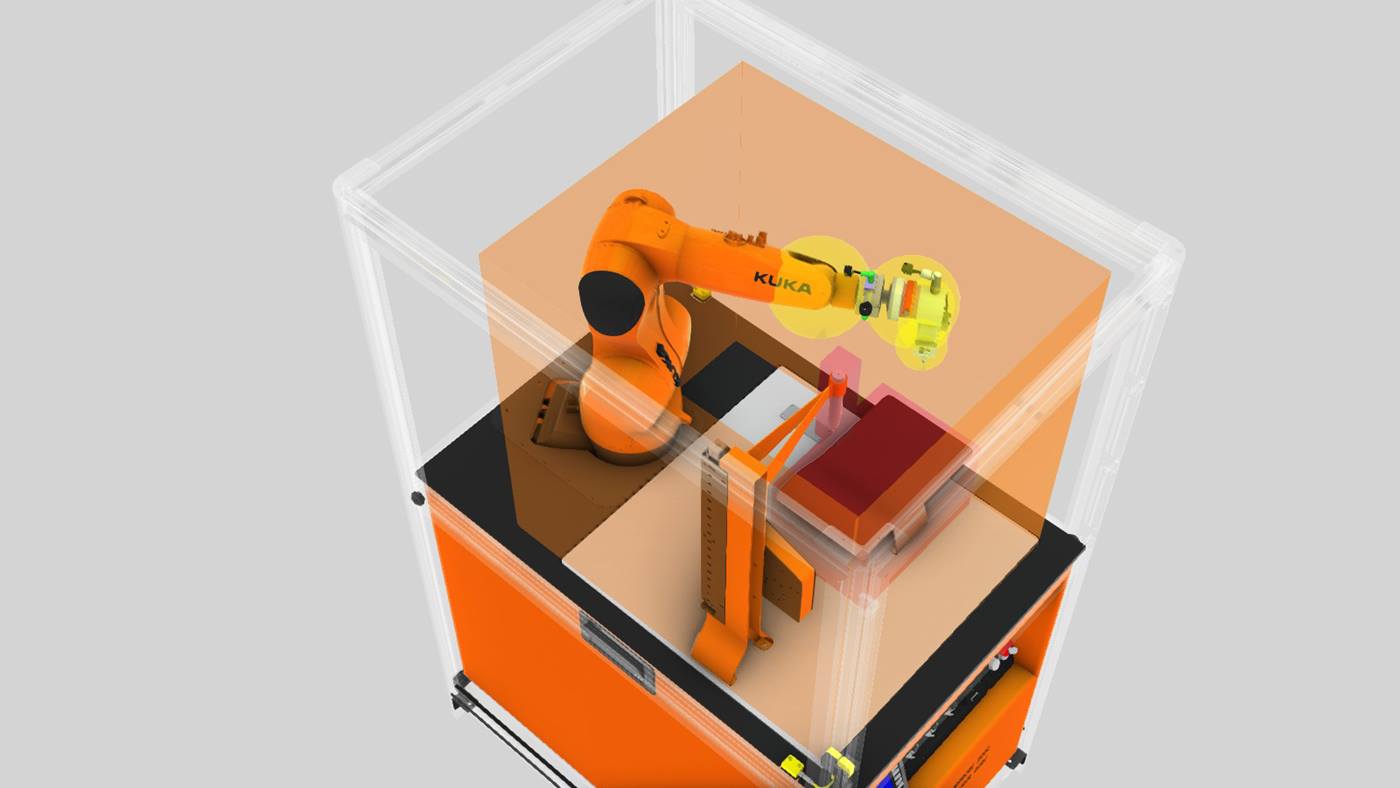
Felügyeleti terek KUKA.SafeOperation rendszerrel
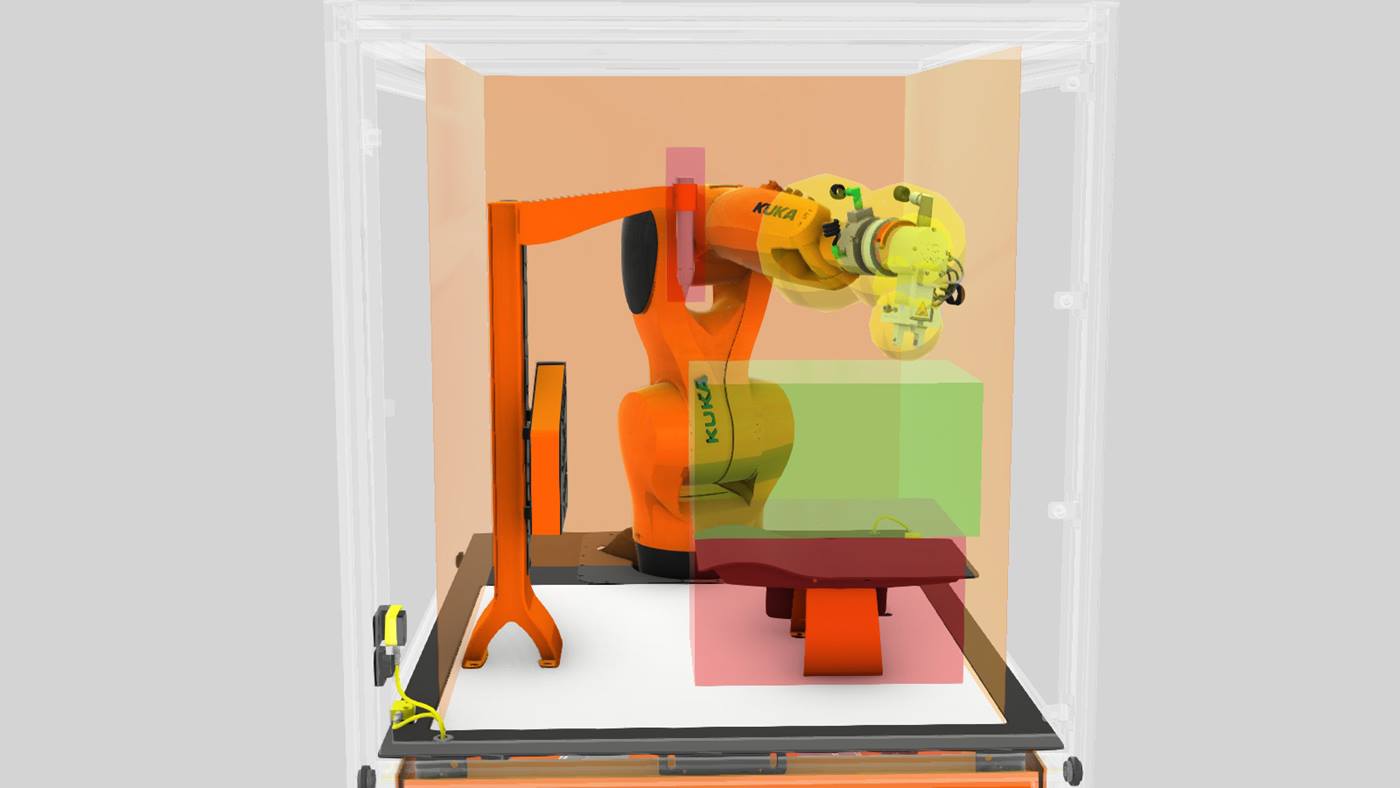
A középpontban a biztonság áll. A szoftver az elméleti munkatér biztonságos csökkentéséhez maximum 16 felügyeleti teret biztosít és egy rögzített cellaterületet – ezeknek a felügyeleti tereknek a meghatározása alapján viselkedik a robot.
Minden egyes terület egyedileg határozható meg. Válasszon a Descartes-féle mozgatásos meghatározás vagy a tengelyspecifikus meghatározás közül. Továbbá a következető tértípusok közül választhat:
- Munkatér
- Védett tér
- Jelző védett tér (nem megállító)
- Jelző munkatér (nem megállító)
- Cellaterület (nem kapcsolható)