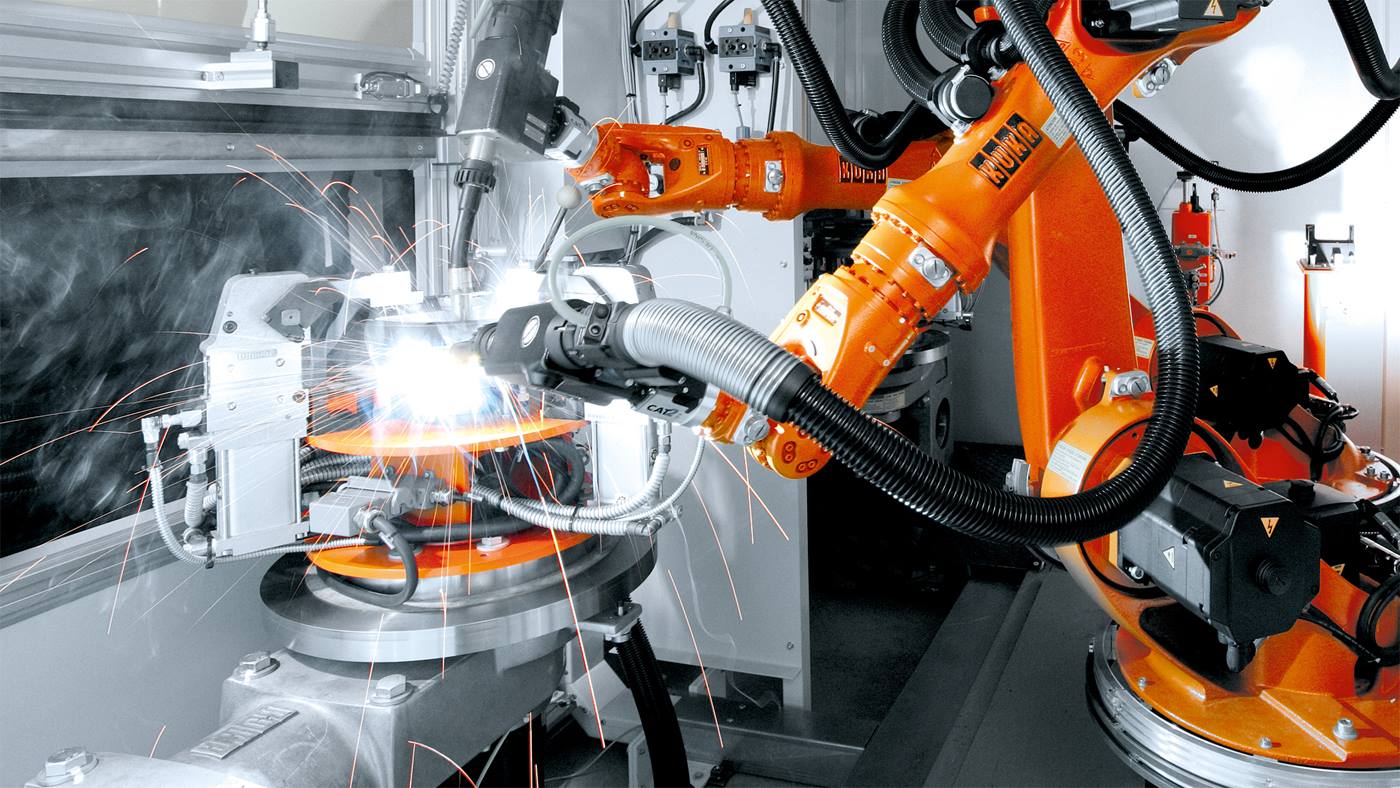
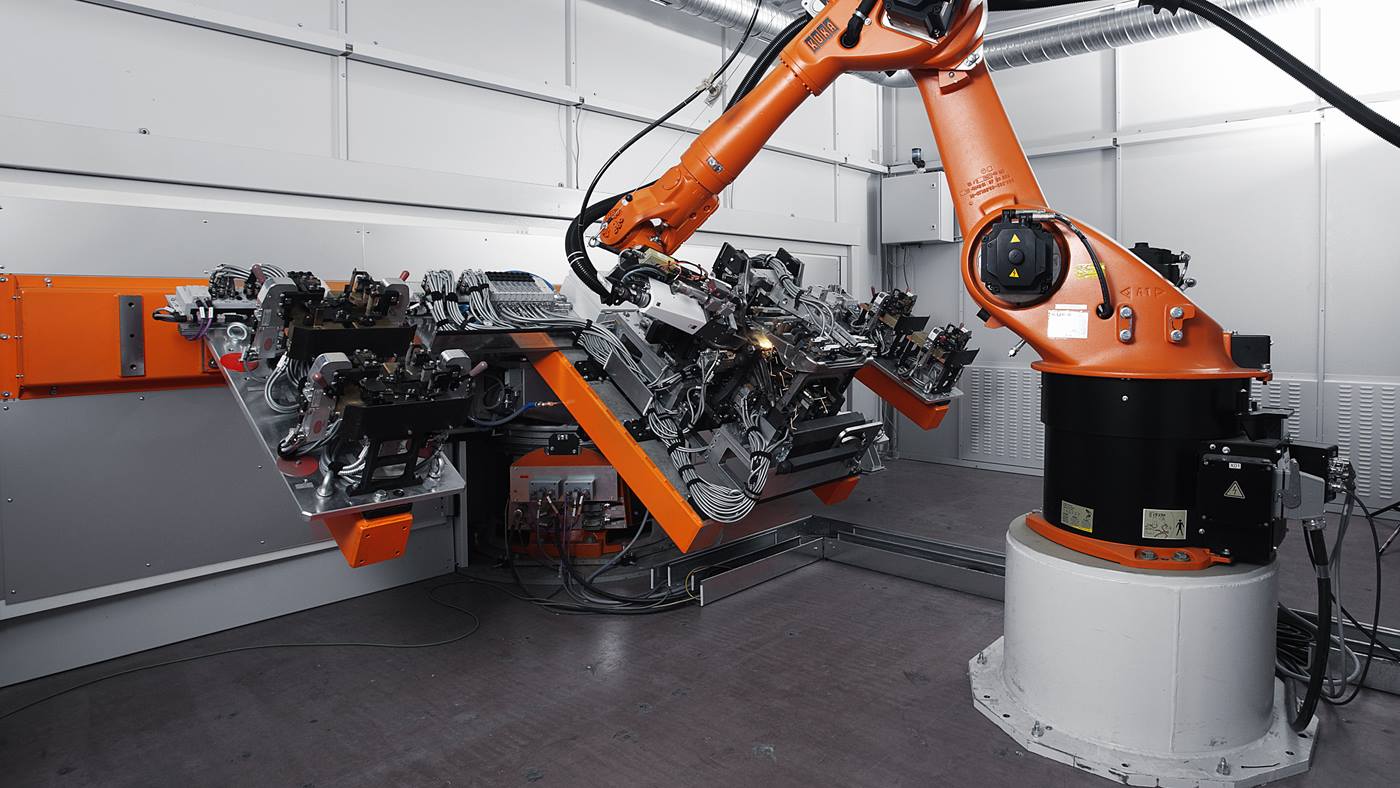
KUKA.SeamTech Tracking e KUKA.SeamTech Finding
O software de aplicação KUKA.SeamTech Tracking como também KUKA.SeamTech Finding pode ser adicionado opcionalmente à unidade de comando do robô KR C4. Através de um sensor de triangulação inteligente, o robô com o KUKA.SeamTech Finding pode executar a localização de componente e de cordão antes da solda, e com o KUKA.SeamTech Tracking o acompanhamento de borda ou de cordão durante a solda.
Vantagens do KUKA.SeamTech
Comunicação perfeita entre o sensor e a unidade de comando
KUKA.SeamTech Finding e Tracking são opções para a ativação e programação de sensores de triangulação inteligentes via Ethernet – no SeamTech Tracking até com um eficiente protocolo de tempo real.
Programação simples com auxílios de programação KUKA
A programação de aplicação dos comandos de sensor do robô ocorre de maneira convencional com formulários Inline claros e de rápida programação. Aqui também são úteis as teclas de estado que possibilitam uma operação rápida de robôs e funções de sensores.
Pacotes de tecnologia de combinação flexível
KUKA.SeamTech Finding e Tracking são pacotes de tecnologia independentes e podem ser combinados com outras opções como, por exemplo, ArcTech Basic, ArcTech Advanced, LaserTech ou GlueTech.
KUKA.SeamTech Tracking
Com o KUKA.SeamTech Tracking o robô pode executar um acompanhamento de borda e cordão com um sensor dos fabricantes SERVO-ROBOT Inc.,Scansonic MI GmbH, BavariQ Sensor GmbH & Co. KG ou wenglor sensoric GmbH. Sistemas de sensores de outras empresas que comunicam via protocolo Ethernet e XML também podem ser conectados. Isso pode ser adicionado ao WorkVisual pelo usuário com um protocolo de interface adaptado ao sensor. Através da interface de tempo real Ethernet especialmente eficaz da KUKA, o sistema de sensores pode executar sem problemas uma correção de trajetória muito exata do robô, tanto nas velocidades de solda típicas para a solda MIG/MAG e WIG, como também nas velocidades de solda muito elevadas da solda a laser.
O acompanhamento de cordão pode ser programado através dos formulários Inline independentes, de acordo com cada aplicação de solda, por exemplo, de forma volante ou com uma parada exata. Além disso, o SeamTech Tracking oferece também comandos especiais para uma localização dinâmica de início de cordão e de fim de cordão. Assim o robô pode adaptar de forma independente a posição e o comprimento do cordão de solda, de acordo com o componente a ser soldado.
KUKA.SeamTech Finding
O KUKA.SeamTech Finding pode ser usado para operar sensores dos fabricantes SERVO-ROBOT inc, Scansonic MI GmbH, BavariaQ Sensor GmbH & Co. KG ou wenglor sensoric GmbH. Sistemas de sensores de outras empresas que comunicam via protocolo Ethernet e XML também podem ser conectados. Isso pode ser adicionado ao WorkVisual pelo usuário com um protocolo de interface adaptado de acordo com o sensor. A grande vantagem da localização de componente ou de cordão com sensores a laser de linha inteligentes é que estes podem registrar várias informações de geometria do componentes em uma medição.
Com base na geometria de componente registrada, o software KUKA.SeamTech Finding pode calcular com extrema rapidez um deslocamento e/ou torção do componente, do cordão ou de pontos de trajetória individuais. Através desses cálculos o programador pode, de forma extremamente flexível, ativar ou desativar uma correção no programa do robô, que pode ser até 6D. Dessa forma o componente pode ser processado da forma mais otimizada possível e segura quanto ao processo.