ข้อกำหนดด้านสุขอนามันที่เพิ่มขึ้น โซลูชันที่ยั่งยืน
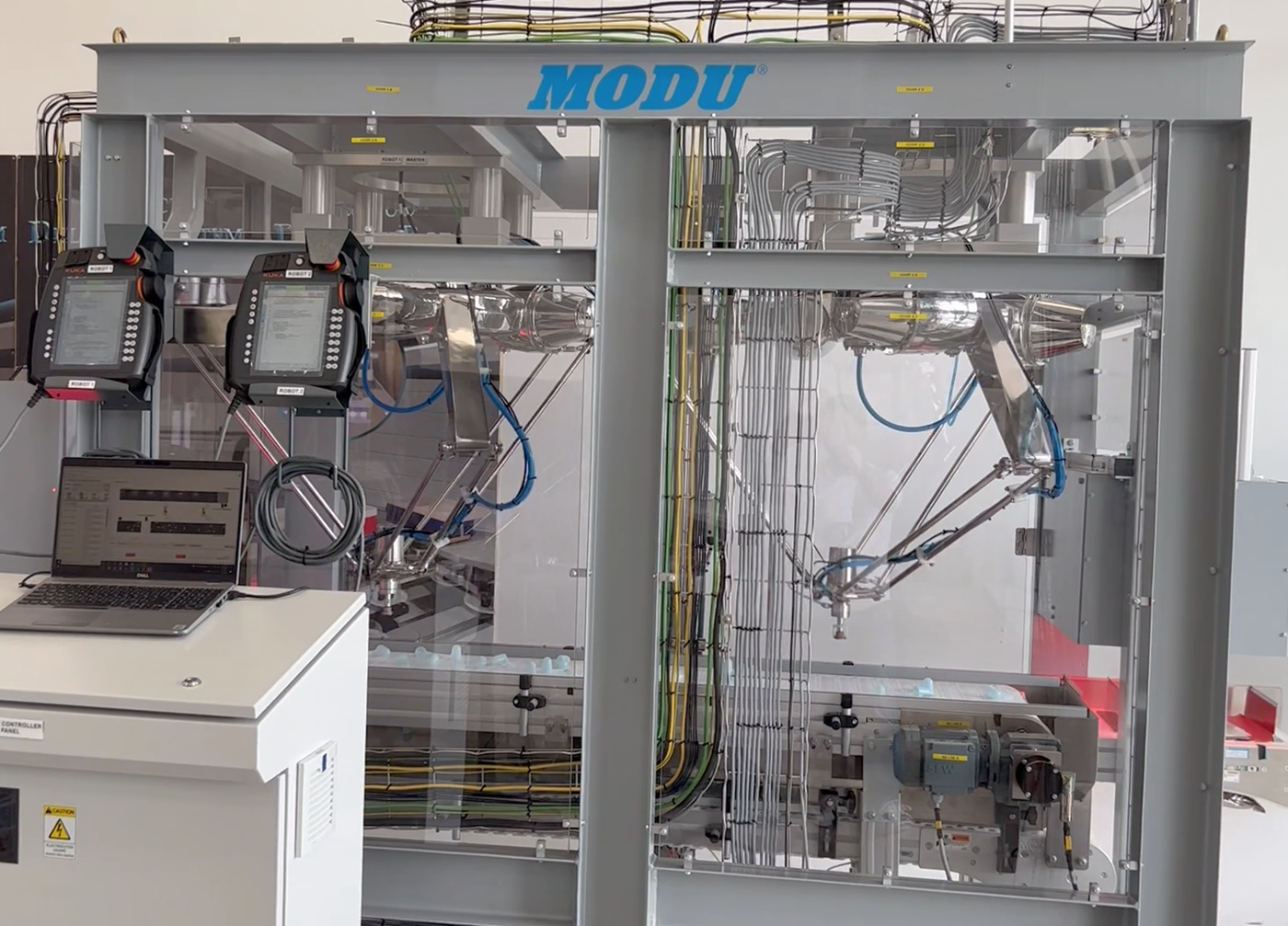
สุขอนามัยเป็นองค์ประกอบพื้นฐานของความปลอดภัยด้านอาหารและเป็นความท้าทายของอุตสาหกรรมอาหาร ข้อกำหนดด้านสุขอนามัยของพื้นที่การผลิตที่เพิ่มสูงขึ้น การทำความสะอาดและการฆ่าเชื้อพื้นผิวและอุปกรณ์ รวมถึงบุคลากรที่ผ่านการฝึกอบรมและมีสุขภาพดีล้วนแต่เป็นประเด็นสำคัญ MODU System บริษัทผู้ทำระบบสัญชาติมาเลเซียต้องการสนับสนุนอุตสาหกรรมด้วยความเชี่ยวชาญในโซลูชันระบบอัตโนมัติที่ใช้หุ่นยนต์ บริษัทได้รับการสนับสนุนจาก KUKA ซึ่งมีหุ่นยนต์ที่ตรงตามข้อกำหนดดังกล่าวได้ยอดเยี่ยม นั่นก็คือ KR DELTA “เราต้องการให้ลูกค้าเชื่อมั่นในตัวเรา” Rajinderjit Singh ผู้จัดการประจำภูมิภาคของ MODU System กล่าว “เราจึงลงทุนซื้อทรัพยากรจำนวนมากสำหรับพัฒนาเทคโนโลยีและทำงานร่วมกับพาร์ทเนอร์อย่างเช่น KUKA อย่างใกล้ชิดเพื่อหาโซลูชันที่ยั่งยืนมากขึ้นสำหรับหุ่นยนต์”