軟體工作原理
透過機器人控制系統中的調節機制,可在使用最小控制參數集的情況下透過所指示的運動來獲得相應位置。
一旦伺服鉗在運動期間接觸到某一部件,機器人便停止。如果位置偏差較大,則將機器人在焊鉗閉合時拖至相應位置。
通常補償運動可彌補的間距為 +/- 1.5 公釐。在此已經考慮到了電極頭燒損以及焊鉗臂彎曲的情況。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果
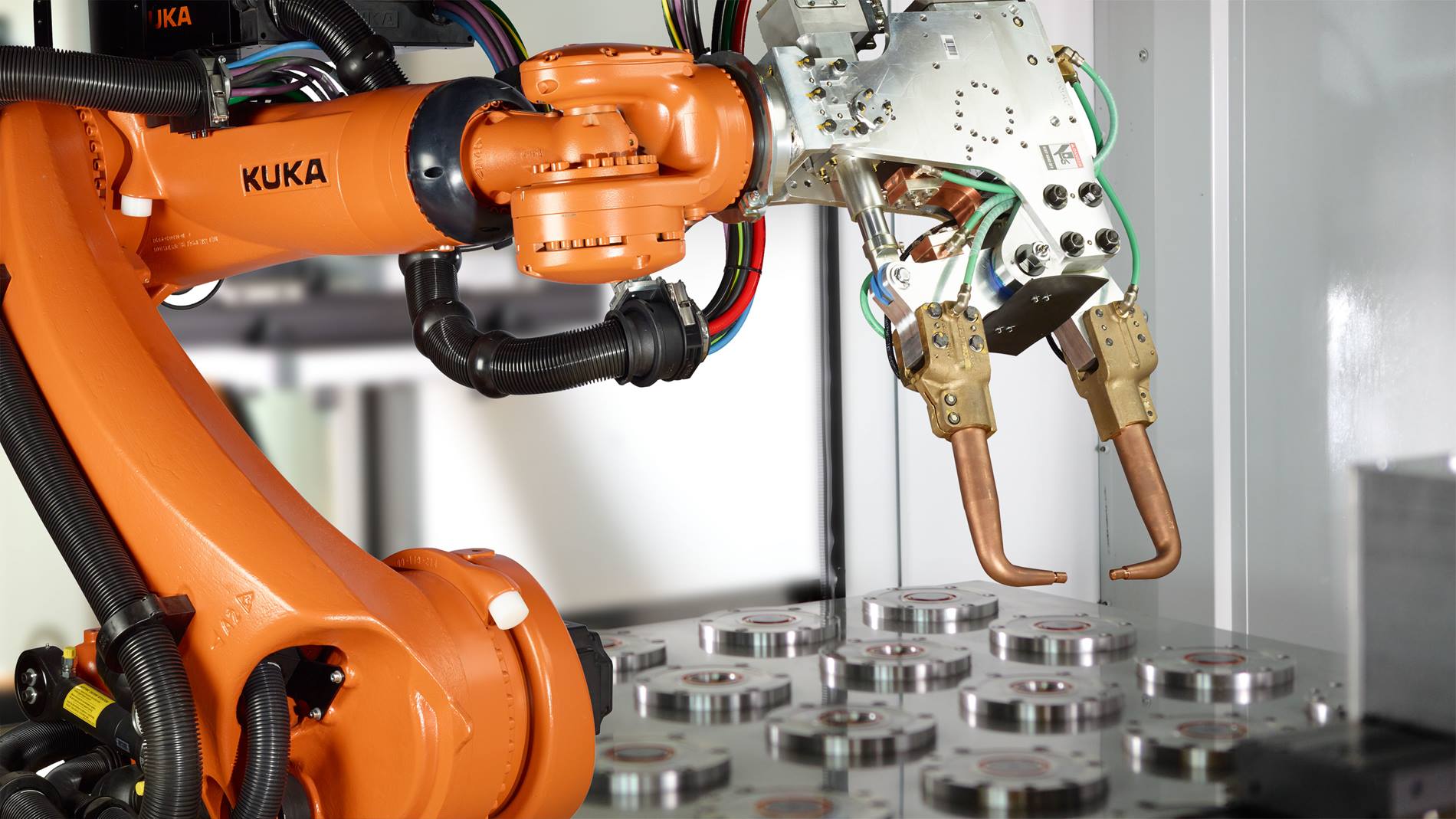
KUKA.EqualizingTech 軟體是 ServoGun 技術套裝的附加選項。由此可以透過機器人的運動對伺服點焊鉗進行補償。藉由於該軟體,您無需再使用焊鉗平衡系統。
KUKA.Equalizing 是 KUKA.ServoGun 的附加軟體,負責透過機器人的運動執行傳統的焊鉗機械平衡功能,並由此實現位置補償,而不依賴焊鉗定位。與傳統型的與重力效應相關的焊鉗平衡系統相比,該系統顯示出巨大優勢。
KUKA.Equalizing 可透過機器人的運動將焊鉗相對於部件進行正確定位。這樣,即使由於焊鉗臂彎曲、電極頭燒損或部件出現位置偏差,也可以透過機器人的運動進行補償。用 KUKA.EqualizingTech 獲得的補償將會減小工件上的殘餘力。
透過機器人控制系統中的調節機制,可在使用最小控制參數集的情況下透過所指示的運動來獲得相應位置。
一旦伺服鉗在運動期間接觸到某一部件,機器人便停止。如果位置偏差較大,則將機器人在焊鉗閉合時拖至相應位置。
通常補償運動可彌補的間距為 +/- 1.5 公釐。在此已經考慮到了電極頭燒損以及焊鉗臂彎曲的情況。
使用應用軟體時,可以省去氣動平衡系統所需的複雜試運轉工作。由於不必使用傳統的平衡系統部件,因而 KUKA.EqualizingTech 又為您節省了投資成本並降低了維修費用。
使用 KUKA.EqualizingTech 軟體之後,例如線性軸承、支撐托架或閥門、減壓器和軟管等附加部件變得多餘。甚至連感測器、電氣控制系統和壓縮空氣基礎設施也無需使用。
使用 KUKA.EqualizingTech 可使總重大大減輕,與傳統的點焊鉗相比最多可減輕 20 %。