Időbeli és geometriai összekapcsolás KUKA.RoboTeam szoftverrel
Robotok időbeli összekapcsolása
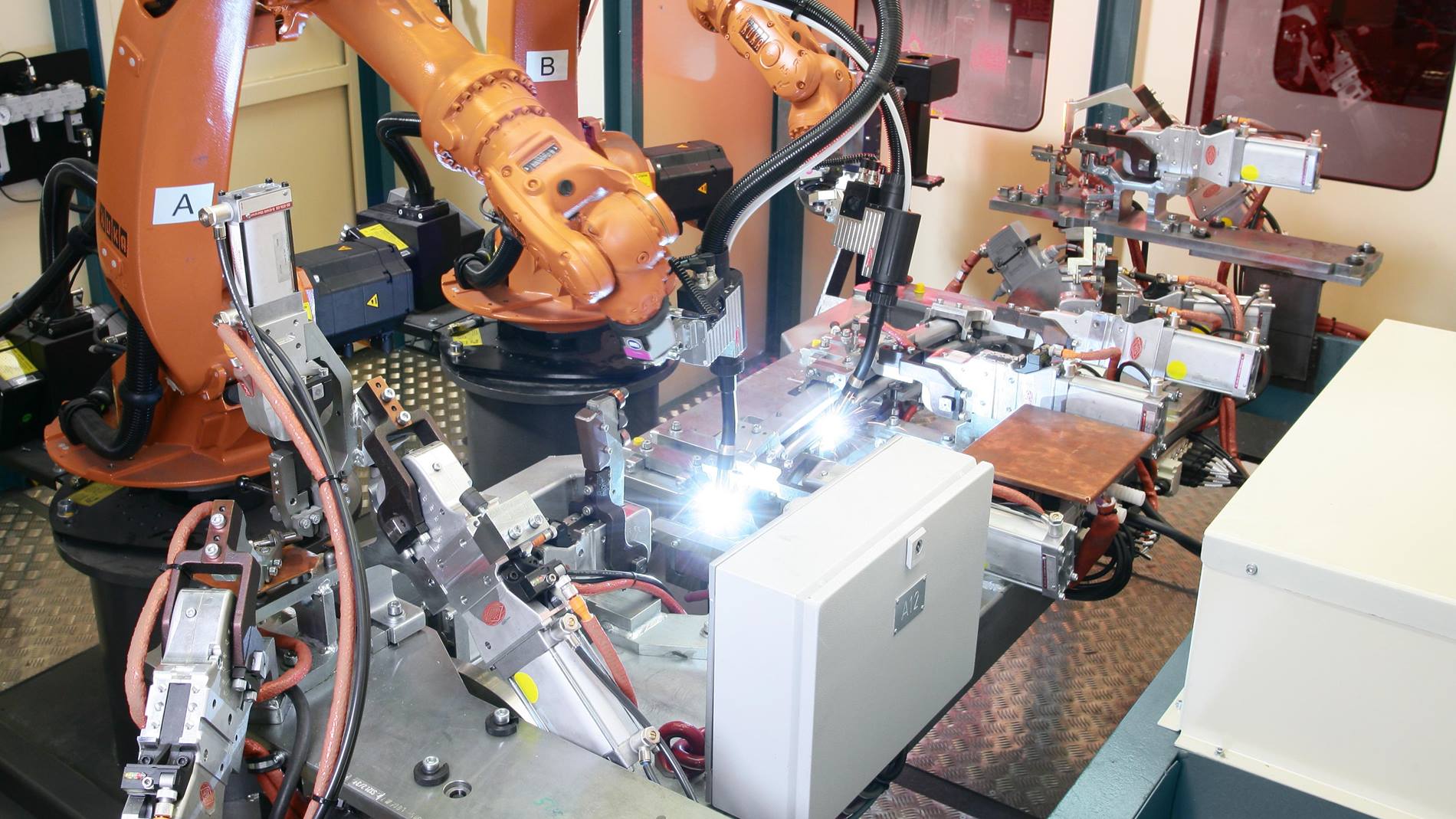
A KUKA.RoboTeam szoftverrel közvetlenül a robotcsoportba integrálhatóak az olyan klasszikus, központi PLC-funkciók, mint a munkaterület lezárása vagy a programok szinkronizálása . Így minden, a robotcsoportot közvetlenül érintő feladatot az adott csoport önállóan lát el.





