Accoppiamento temporale e geometrico con il software KUKA.RoboTeam
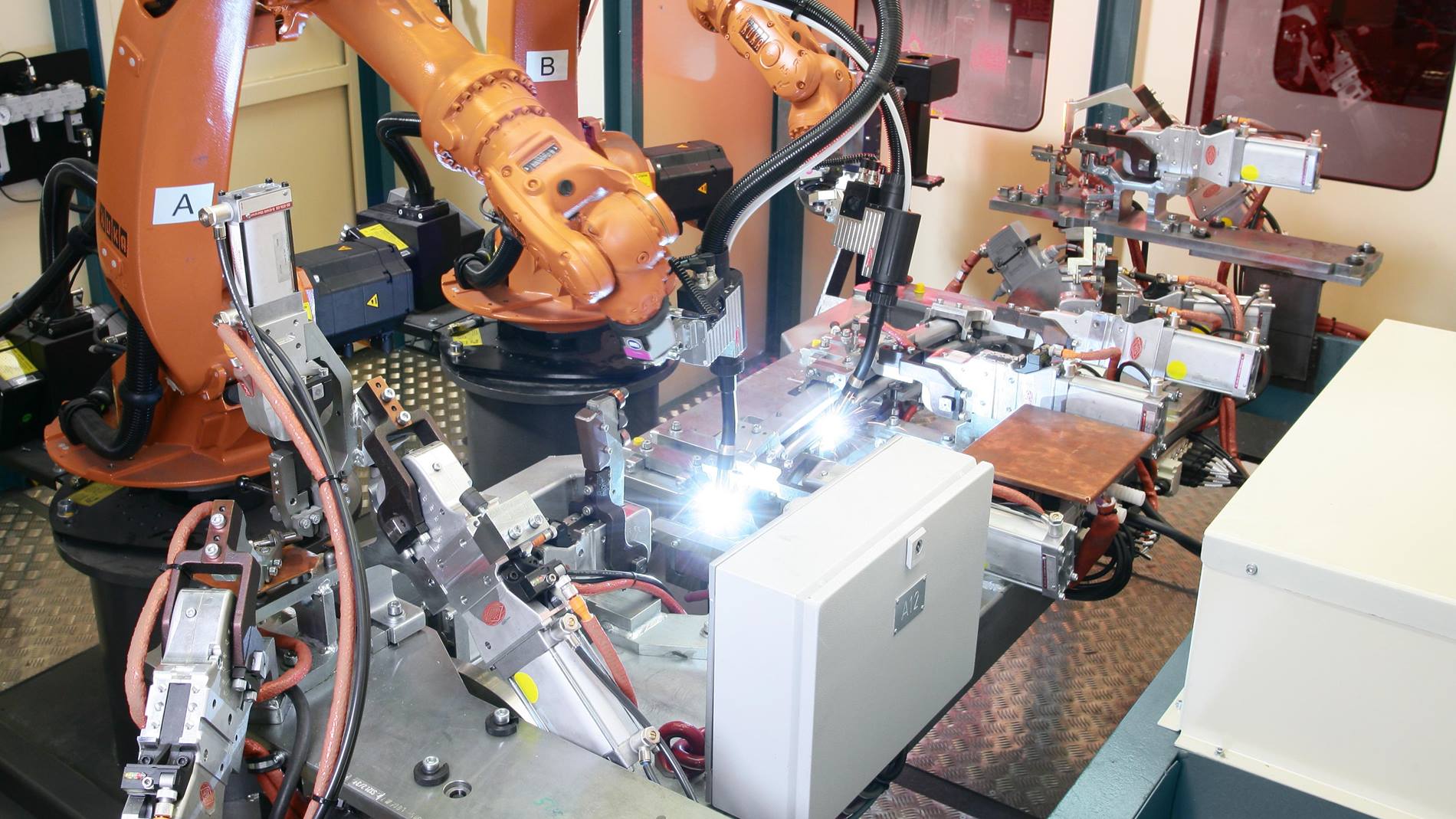
Accoppiamento temporale di robot
Il software KUKA.RoboTeam permette di trasferire le classiche funzionalità PLC centrali, quali gli interblocchi delle zone di lavoro o la sincronizzazione del programma, direttamente al gruppo di robot. Tutti i compiti che interessano direttamente il gruppo di robot possono essere assunti così in modo autarchico.





