軟體工作原理
KUKA.ServoGun 可以用來實現焊鉗的自動控制,原理如下:
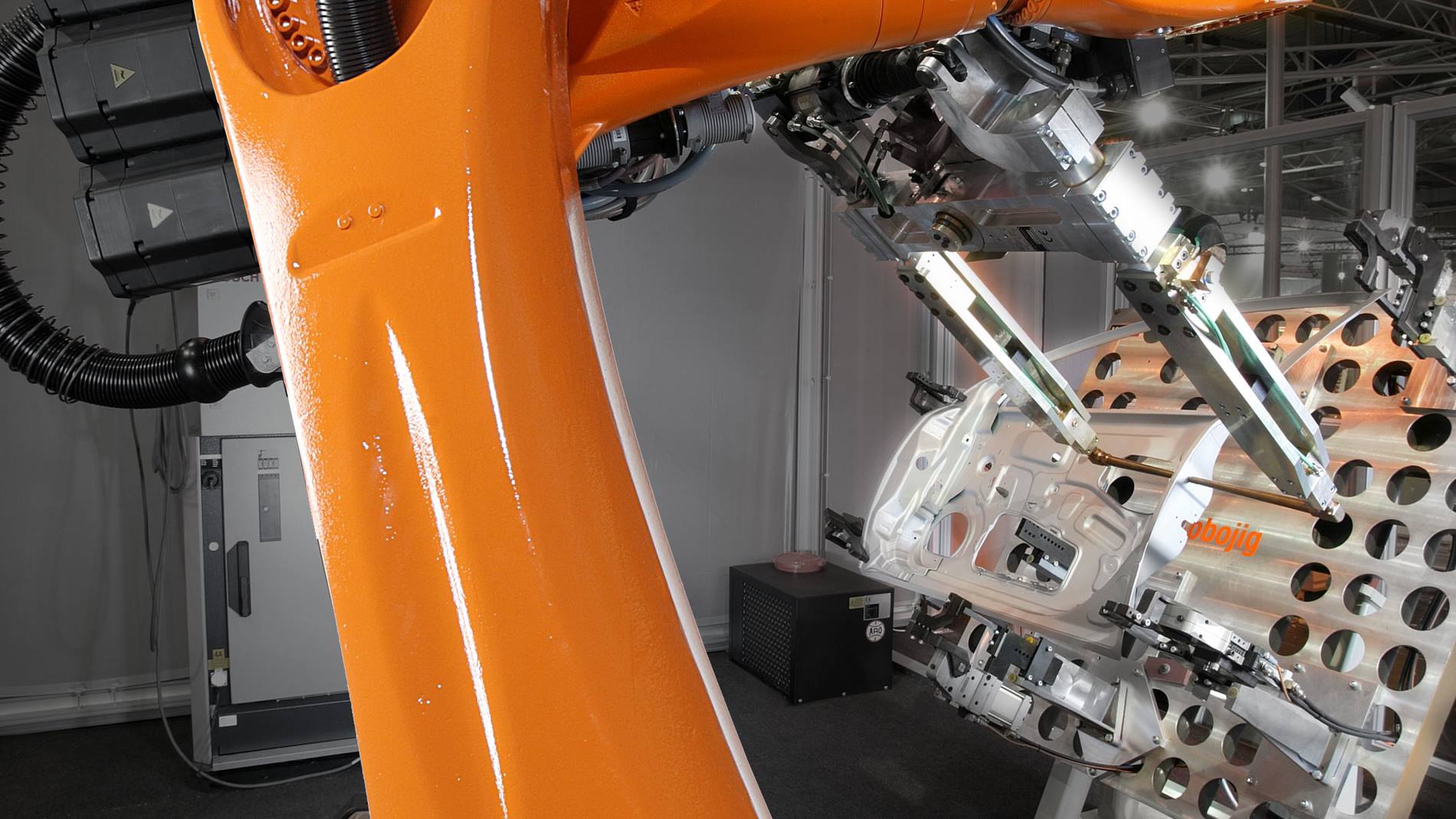
機器人首先透過位置調整移向指定的焊接點,在焊鉗放在工件上之前,焊鉗減速至設定的恒定速度,然後透過校正的位置將作用力增加至設定的目標作用力。
使用感測器時,只要達到接通閾值,機器人控制系統在運動期間仍然可以從位置調整切換為作用力調整。焊鉗透過作用力調整繼續將工件壓緊,達到焊接作用力,發出開始焊接的訊號並在焊接過程中保持焊鉗上的作用力恒定然後點焊,在該焊接過程中,力感測器測量焊鉗上產生的作用力,並將測量結果傳送至機器人控制系統。當焊接計時器發出焊接結束的訊號時,機器人控制系統重新切換到位置調整,焊鉗將會自動打開。
KUKA.ServoGun 的使用優勢
安裝方便
由於採用試運轉功能,KUKA.ServoGun 的設定很方便。您可以非常方便地透過狀態鍵來操作基本功能。試運轉後,您可以透過詳細的過程和結果來改進和記錄。
應用靈活
透過 KUKA.ServoGun,您可以使用市場上與 KUKA 控制系統相容的所有伺服馬達。常用的操作方案使行指令可以用於所有應用情況。此外,該軟體還提供可任意設定的焊接計時器連接和眾多的擴充選項。實際的焊鉗力取決於重力、老化程度以及溫度。
高效率校準
該軟體可以透過由外部控制系統支援的力感測器實現作用力的自動校準,該作用力感測器在零點標定感測器的標準介面上運行。此外,電極頭固定修磨期間的機器人搬運等後臺流程可確保流程效率更高。
精確補償
由於採用新型的作用力控制機構,您可以透過 KUKA.ServoGun 達到更高的作用力精確度。這可確保更高的品質、精確度以及對外部影響的抵抗力。
KUKA.ServoGun:類型和選項
KUKA.ServoGun 技術套裝中有兩種工藝技術可用:一種是 KUKA.ServoGunAdvanced(目前只能向 KUKA 購買),用於配有內建力感測器的伺服馬達;另一種是 KUKA.ServoGunBasic,用於配有機器人控制系統轉矩模式的伺服馬達。因此,這兩種工藝技術可以滿足不同應用情況的需要。
KUKA.ServoGunAdvanced 適用於:
- 難於接合的板材組合,例如高硬度合金、有堅硬塗層的金屬以及其他特殊材料。
- 難於焊接的材料連接件以及具有很高品質要求的接合應用
KUKA.ServoGunBasic 適用於: