Monitorované prostory s KUKA.SafeOperation
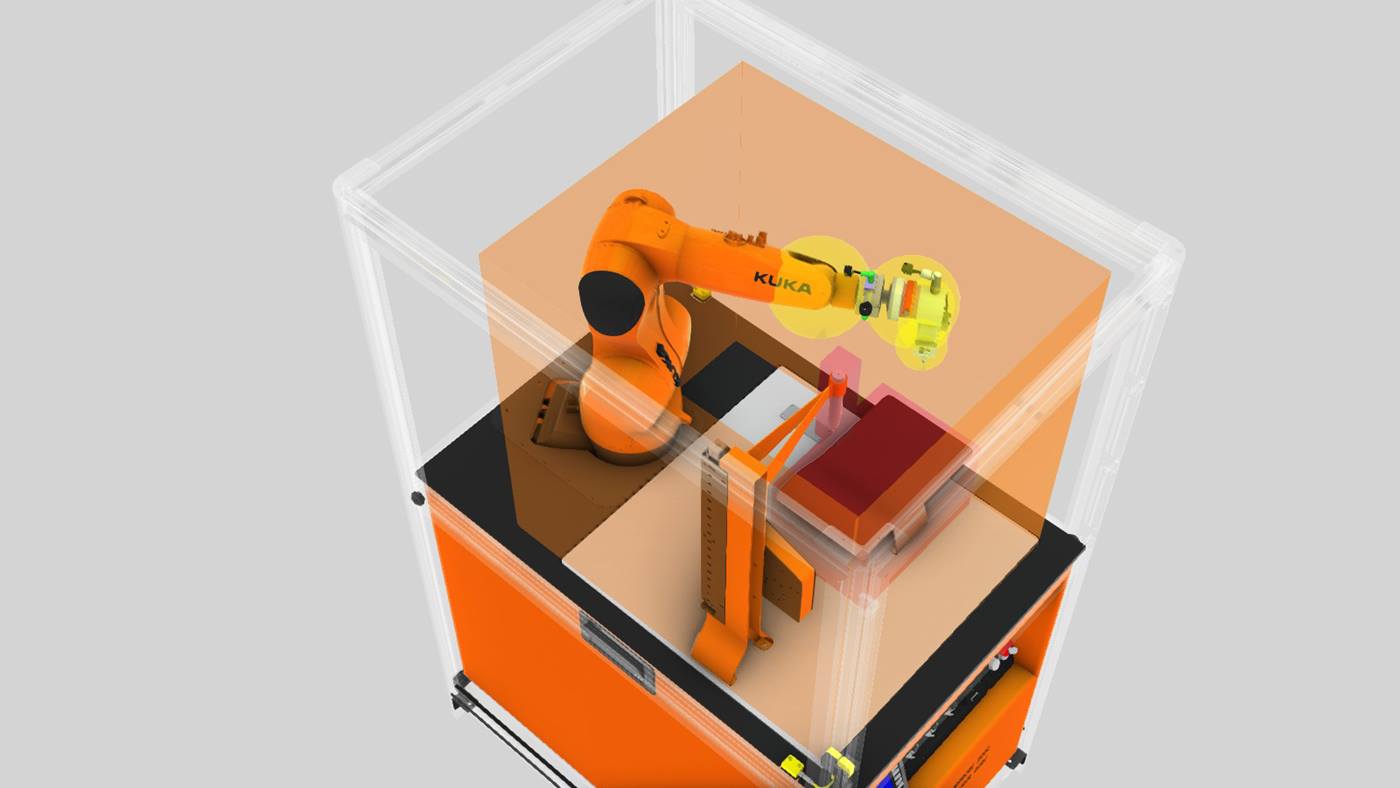
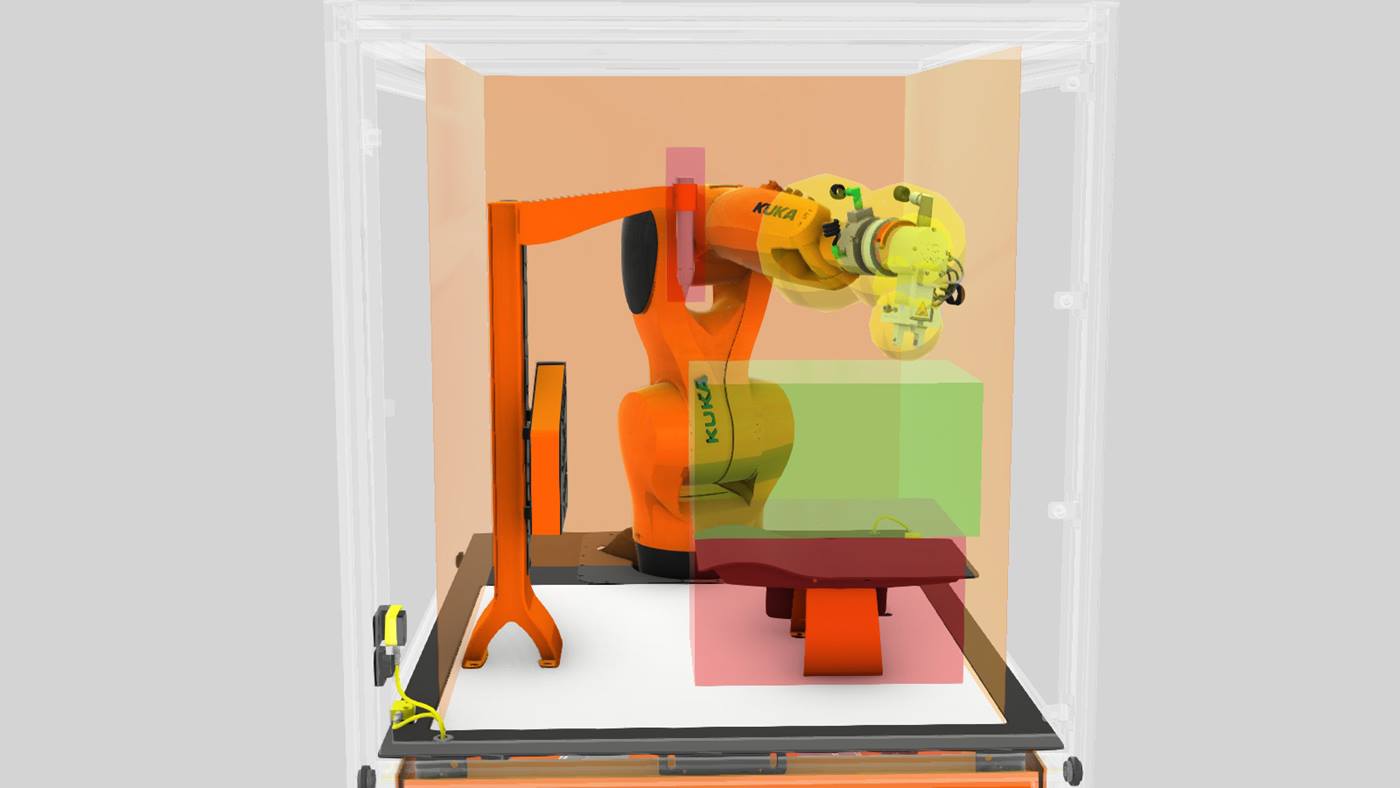
Ve středu zájmů je bezpečnost. K bezpečné redukci teoretického pracovního prostoru nabízí software až 16 monitorovaných prostorů a jedenu pevnou oblast buňky – definice těchto monitorovaných prostorů určuje chování robota.
Každou oblast lze stanovit individuálně. Vyberte si mezi kartézskou nebo osově specifickou definicí. Navíc rozlišujte mezi těmito druhy prostorů:
- Pracovní zóna
- Ochranná zóna
- Signální bezpečnostní prostor (nezastavující)
- Signální pracovní prostor (nezastavující)
- Prostor buňky (nelze ovládat)