Vous utilisez le navigateur Internet Explorer. Pour bénéficier d’une représentation optimale, veuillez changer votre navigateur.
KUKA OccuBot : le système de test intelligent
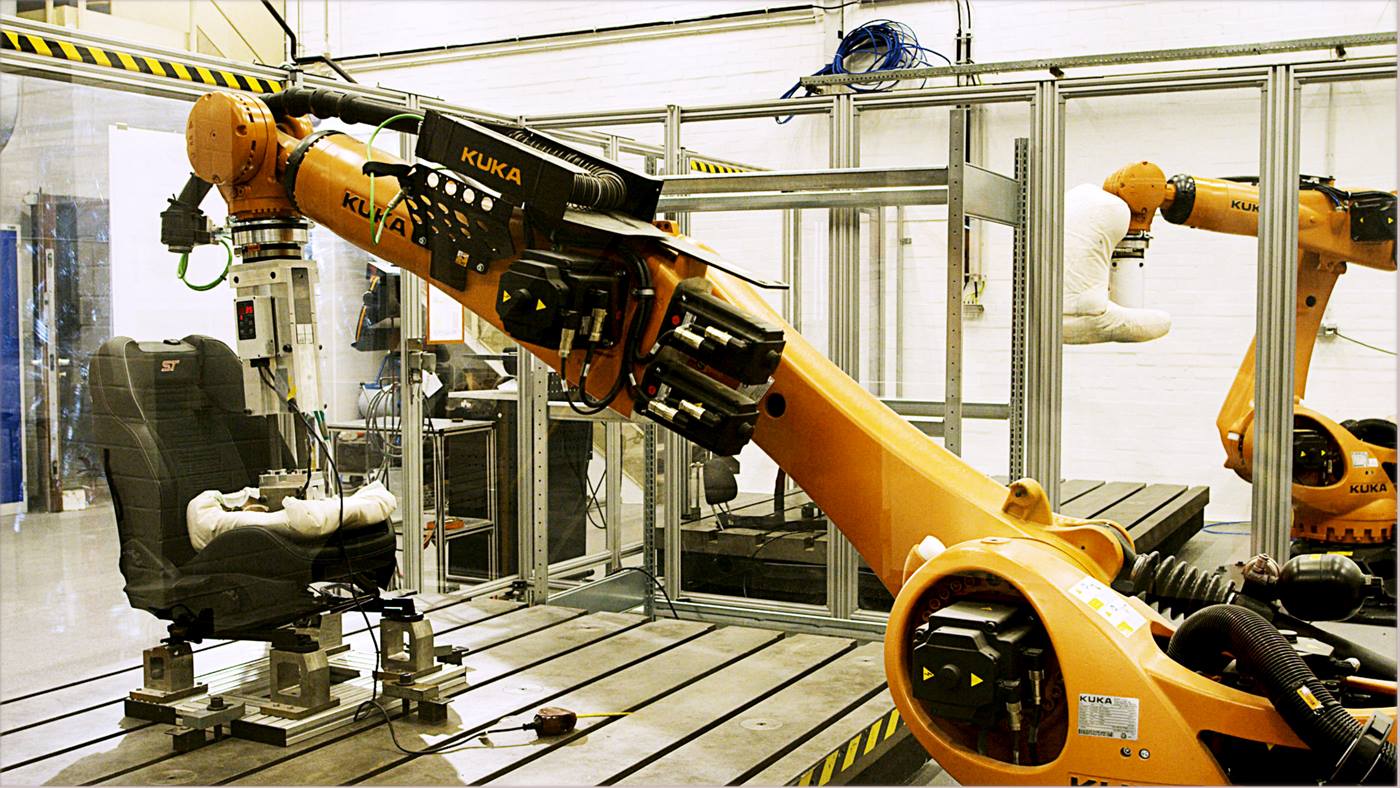
Le KUKA OccuBot est un système de mesure entièrement automatisé. Un robot à six axes contrôle avec un maximum de précision le niveau de sûreté et de stabilité des sièges d'avion et de conduite sous sollicitation mécanique permanente. L'industrie de l'ameublement utilise l'OccuBot à des fins de contrôle pour les sièges.
Voici comment fonctionne l'OccuBot
Le système test OccuBot est composé de six composants, qui reproduisent les mouvements et les charges humaines à l'aide de capteurs de couple de force. Cette forme de contrôle permet une compréhension idéale de situations réalistes et proches de la pratique, par exemple la montée et la descente.
Outre cela, l'OccuBot réalise des tests d'usure du matériel. Il contrôle par exemple, grâce à des mouvements de rotation permanents, la vitesse à laquelle le tissu d'un dossier de siège s'use.
Avantages du KUKA OccuBot
Un maximum de flexibilité et de précision : Six dimensions de mesure permettent de déterminer les forces et couples de l'OccuBot avec une flexibilité et une précision extrêmes. Vous recevez les données sur les forces et les moments apparaissant à la surface avec laquelle le mannequin entre en contact avec le siège.
Adaptation permanente : Lors de chaque cycle de test qu'effectue le mannequin, des forces et couples sont adaptés à la forme en fonction de l'usure. L'interface Ethernet vous permet d'intégrer un système de saisie des données. Vous pouvez ainsi observer l'usure tout au long du cycle entier et enregistrer les données test pertinentes.
Paramétrage simple et processus efficaces : Les positions du mannequin sont librement définies à l'aide d'un timbre horaire. Grâce à des lignes de courbe, le robot peut approcher n'importe quelle position lors d'un déroulement temporel exactement défini. De nombreuses fonctions le permettent, comme par exemple un éditeur pour la définition simple du système de coordonnées de base, fonction "Recherche/Arrêt" pour forces constantes, ou traitement de plusieurs objets, etc.
L'OccuBot à l'œuvre
Utilisation flexible : outre la résistance du siège automobile, l'OccuBot contrôle la fonctionnalité du chauffage de siège.
OccuBot : Composants et étendue de la livraison
L'OccuBot se compose de six composants. Leur interaction en fait un système de test entièrement automatisé directement utilisable. Les composants suivants sont compris dans la fourniture :
Le robot : KR 210 R2700 prime
La base du système test KUKA OccuBot est le KR 210 R2700 prime, un robot industriel de la série KR QUANTEC. Ses six axes se déplaçant librement dans l'espace permettent une flexibilité maximale. Ils garantissent une accessibilité entière de toutes les positions assises réglables et sont, de par leur robustesse, idéalement équipés pour les conditions exigeantes des test de sollicitation permanente.
Le KR 210 R2700 prime de la série KR QUANTEC constitue la base du système OccuBot.
Le contrôleur : Standard KR C4 ed 2015
Le KR QUANTEC est piloté par les composants système complémentaires KR C4 ed 2015. Ce système de contrôle est un module d'armoire robuste, qui outre ses standards éprouvés spécialement pour le système de test OccuBot, comporte un capteur force/couple et la boîte de capteur correspondante.
Le contrôleur KUKA KR C4 ed 2015 est la pièce maîtresse de l'OccuBot.
Le capteur : Capteur de couples-force FT-NET Omega 160
La mesure de haute précision des mouvements réalisés et des sollicitations se fait pour l'OccuBot grâce au capteur couple-force FT-NET Omega 160. Il est fixé à la bride du KR QUANTEC. À une cadence régulière de douze millièmes de secondes, le capteur interroge les données de position du robot et de technique de mesure, les protocole et les traite ensuite immédiatement.
Le capteur OccuBot FT-NET Omega 160 saisit toutes les données de mesure à une cadence de 12 millièmes de seconde.
La commande : KUKA smartPAD
La commande du système OccuBot-System est particulièrement simple et extrêmement pratique grâce au KUKA smartPAD : Il vous suffit de saisir directement la configuration test pour le test de siège lors de la programmation. Grâce à son interface utilisateur intuitive et à l'écran tactile de 8,4 pouces antireflet, vous pouvez diriger jusqu'à huit axes ensemble sans devoir commuter grâce au contrôleur KR C4.
Le KUKA smartPAD est extrêmement convivial et offre une mobilité maximale.
Le mannequin : KUKA Dummy OccuForm
Le KUKA Dummy OccuForm est utilisé pour une simulation la plus réaliste possible des forces et couples créés lors d'un processus test OccuBot. Grâce à la mesure précise du capteur, vous obtenez des données exactes de tous les points auxquels le mannequin touche la surface d'assise. Les forces statiques du mannequin peuvent être compensées grâce à une programmation intelligente pour qu'il ne se produise pas de forces dynamiques supplémentaires.
Un engagement total lors de tout contrôle OccuBot : le KUKA Dummy OccuForm.
Le logiciel : KUKA.OccuBot
Le logiciel KUKA.OccuBot utilisé pour les test OccuBot comporte, outre un outil de configuration, également les logiciels d'application KUKA.User Tech, KUKA.Workvisual et KSS. Ces deux composants sont absolument nécessaires, le KUKA.DIS peut également être installé en option. Grâce à ce troisième logiciel, il est possible d'enregistrer des données et de les exporter par interface USB vers un PC.