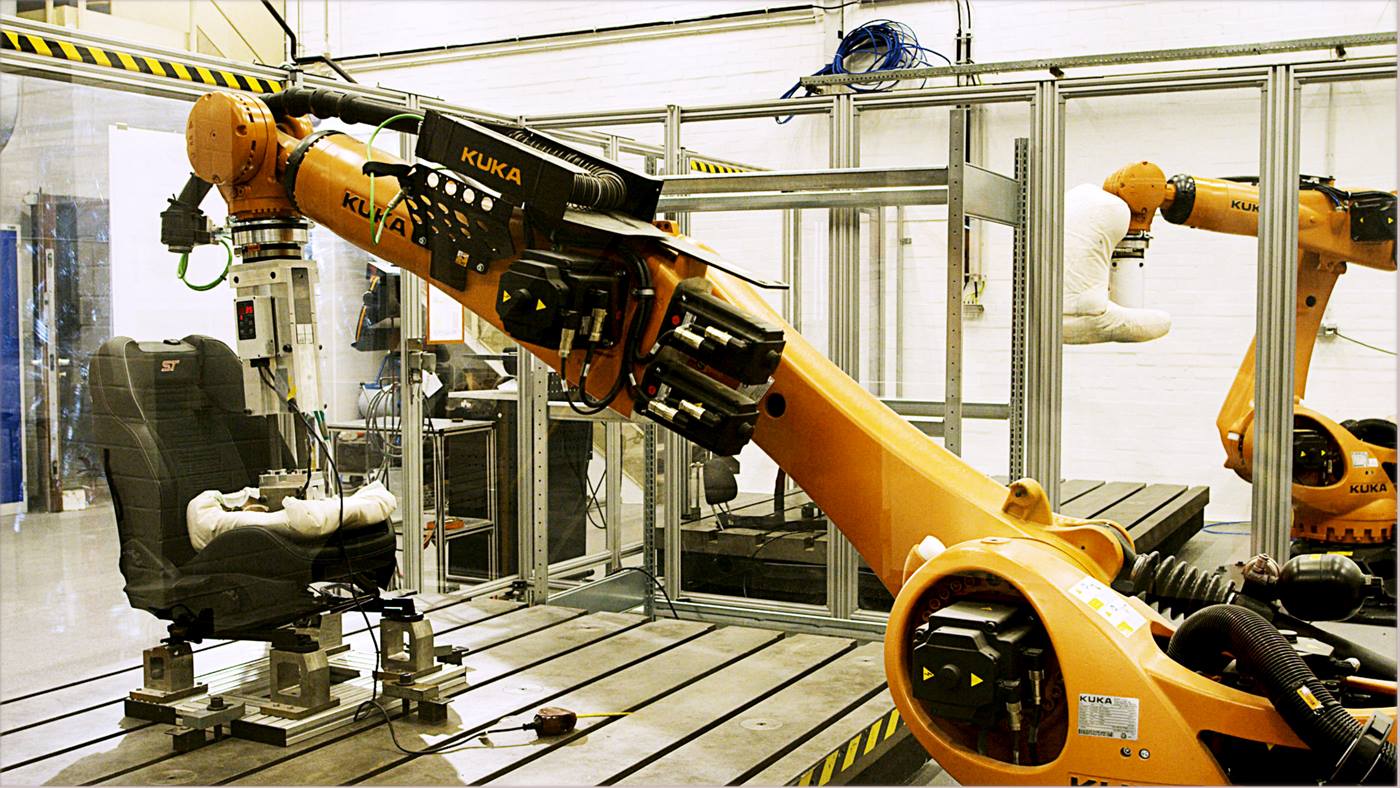
Funzionamento di OccuBot
Il sistema di collaudo OccuBot è formato nel complesso da sei componenti, che tramite sensori di forza e coppia e l’ausilio di manichini (dummy) riproducono i movimenti e i carichi di una persona. Questa forma di collaudo permette di simulare in modo ottimale situazioni realistiche e pratiche, per esempio i movimenti di salita e discesa.
OccuBot esegue inoltre prove di usura del materiale, per esempio con continui movimenti rotatori verifica la rapidità di consumo della stoffa di uno schienale.