Sie verwenden den veralteten Browser Internet Explorer. Für eine optimale Darstellung unserer Website wechseln Sie bitte Ihren Browser
KUKA OccuBot: das intelligente Testsystem
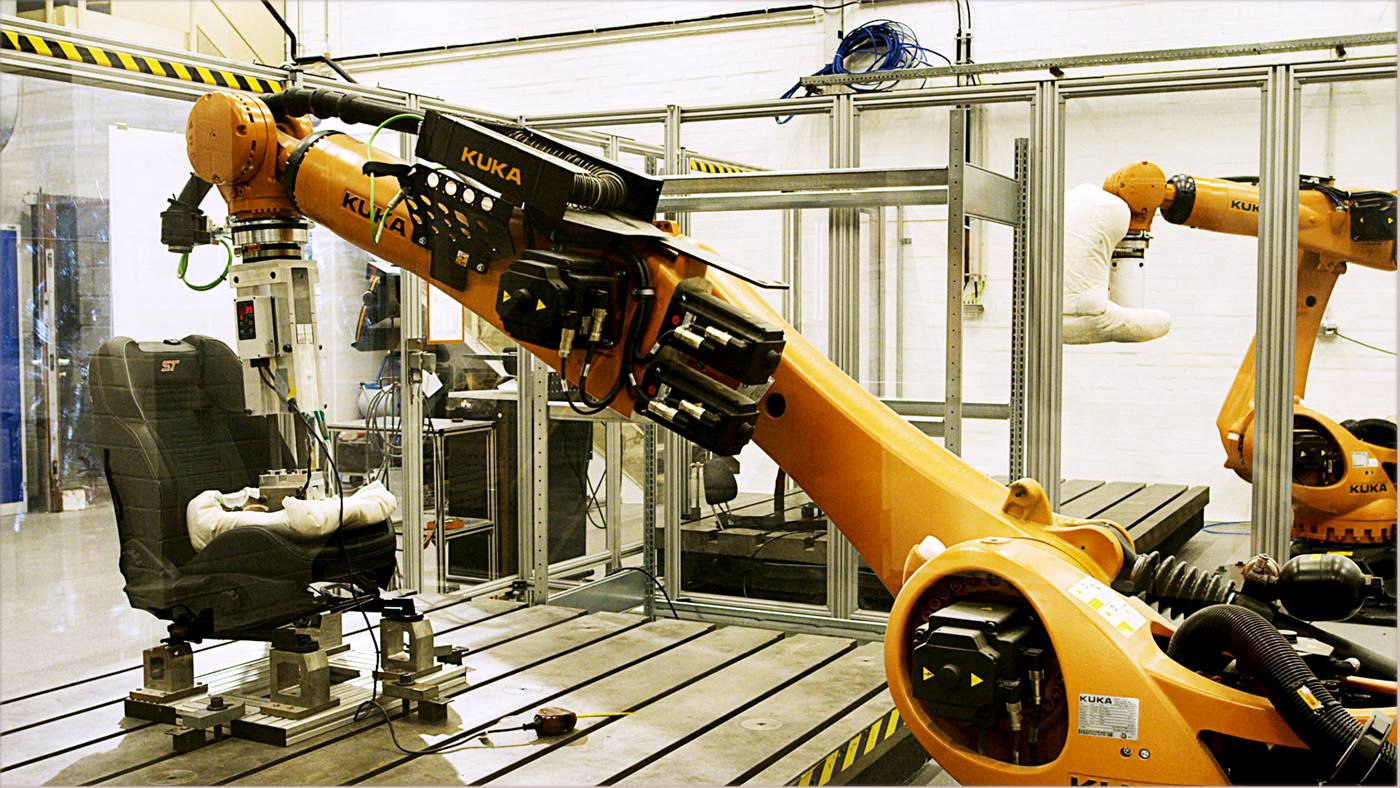
Der KUKA OccuBot ist ein vollautomatisiertes Messsystem. Mit höchster Präzision kontrolliert ein Sechs-Achs-Roboter, wie sicher und stabil Fahr- und Flugzeugsitze unter mechanischer Dauerbelastung sind. Die Möbelindustrie setzt den OccuBot zu Prüfzwecken für Sitzmöbel ein.
So funktioniert der OccuBot
Das Testsystem OccuBot besteht aus insgesamt sechs Komponenten, die durch Kraft-Momenten-Sensoren und Dummys menschliche Bewegungen und Belastung nachstellen. Durch diese Form der Prüfung können realistische und praxisnahe Situationen, zum Beispiel der Ein- und Ausstieg, optimal nachvollzogen werden.
Zusätzlich führt der OccuBot Abnutzungstests des Materials durch. So überprüft er beispielsweise durch kontinuierliche Drehbewegungen, wie schnell der Stoff einer Sitzlehne abscheuert.
Vorteile des KUKA OccuBots
Höchste Flexibilität und Präzision: Durch sechs Messdimensionen können mithilfe des OccuBots Kräfte und Momente bei höchster Flexibilität und Präzision ermittelt werden. Sie erhalten Daten über alle auftretenden Kräfte und Momente an der Oberfläche, wo der Dummy den Sitz berührt.
Kontinuierliche Anpassung: Bei jedem Testzyklus, den der Dummy durchläuft, werden Kräfte und Momente entsprechend dem Verschleiß der Form angepasst. Die Ethernet-Schnittstelle erlaubt es Ihnen, ein externes Datenerfassungssystem anzubringen. Damit können Sie den Verschleiß über die komplette Laufzeit beobachten und die relevanten Testdaten speichern.
Einfache Parametrierung und effiziente Prozesse: Die Positionen des Dummys wird anhand eines Zeitstempels frei definiert. Dank Kurvenlinien kann der Roboter jede Position in einem exakt definierten zeitlichen Ablauf anfahren. Ermöglicht wird dies durch verschiedenste Funktionen – zum Beispiel einen Editor zur einfachen Definition des Base-Koordinatensystems, die „Suchen/Halten“- Funktionalität für konstante Kräfte oder das Bearbeiten mehrfacher Testobjekte.
Der OccuBot in Aktion
Messroboter führt Dauerbelastungstests auf Fahrzeugsitzen durch
OccuBot: Komponenten und Lieferumfang
Der OccuBot setzt sich aus sechs Komponenten zusammen. Ihr Zusammenspiel macht ihn zum direkt einsatzbaren, vollautomatisierten Testsystem. Folgende Komponenten sind im Lieferumfang enthalten:
Der Roboter: KR QUANTEC
Basis des KUKA OccuBot-Testsystems ist der KR 250 R2700-2 , ein Industrieroboter aus der KR QUANTEC-Serie. Seine sechs frei im Raum bewegbaren Achsen ermöglichen maximale Flexibilität. Sie gewährleisten eine umfassende Erreichbarkeit aller einstellbaren Sitzpositionen und sind durch ihre Robustheit optimal für die anspruchsvollen Bedingungen der Dauerbelastungstests ausgestattet.
Der KR 250 R2700-2 aus der KR QUANTEC-Serie ist die Basis des OccuBot-Systems.
Die Steuerung: Standard KR C4 ed 2015
Gesteuert wird der KR QUANTEC durch die ergänzende Systemkomponente KR C4 ed 2015. Bei diesem Steuerungssystem handelt es sich um ein robustes Schrankmodul, das neben seinen bewährten Standards speziell für das OccuBot-Testsystem einen passgenauen Kraft-Momenten-Sensor und die dazugehörige Sensorbox enthält.
Die KUKA-Steuerung KR C4 ed 2015 ist das Herzstück des OccuBots.
Der Sensor: Kraft-Momenten-Sensor FT-NET Omega 160
Die hochpräzise Messung der erfolgten Bewegungen und Belastungen erfolgt beim OccuBot durch den Kraft-Momenten-Sensor FT-NET Omega 160. Er wird am Flansch des KR QUANTEC befestigt. In einem regelmäßigen Takt von zwölf Millisekunden fragt der Sensor Messtechnik- und Roboterpositionsdaten ab, protokolliert sie und verarbeitet sie umgehend weiter.
Der OccuBot-Sensor FT-NET Omega 160 erfasst sämtliche Messdaten im 12-Millisekunden-Takt.
Die Bedienung: KUKA SmartPad
Die Bedienung des OccuBot-Systems ist durch das KUKA SmartPad besonders einfach und extrem komfortabel: Geben Sie die Testkonfiguration für den Sitztest einfach direkt bei der Programmierung ein. Durch seine intuitive Bedienoberfläche und das mit 8,4 Zoll angenehm große, entspiegelte Touch-Display können Sie im Zusammenspiel mit der KR C4-Steuerung bis zu acht Achsen ohne Umschalten lenken.
Das KUKA SmartPad ist äußerst anwenderfreundlich und bietet maximale Mobilität.
Der Dummy: KUKA Dummy OccuForm
Für eine möglichst realistische Simulation der entstandenen Kräfte und Momente wird im OccuBot-Testverfahren der KUKA Dummy OccuForm eingesetzt. Dank der präzisen Messung des Sensors erhalten Sie exakte Daten aller Punkte, an denen der Dummy die Sitzoberfläche berührt. Durch eine smarte Programmierung lassen sich die statischen Kräfte des Dummys selbst kompensieren – auf diese Weise können keine zusätzlichen dynamischen Kräfte entstehen.
Leistet in jeder OccuBot-Prüfung vollen Einsatz: der KUKA Dummy OccuForm.
Die Software: KUKA.OccuBot
Die für OccuBot-Tests verwendete Software KUKA.OccuBot enthält neben einem Konfigurierungstool zusätzlich die Applikations-Software KUKA.User Tech, KUKA.Workvisual und KSS. Diese beiden Komponenten sind unbedingt erforderlich, optional kann außerdem noch KUKA.DIS Datenlogging Software auf einem externen PC installiert werden. Durch diese dritte Software ist es möglich, Daten aufzuzeichnen und sie per USB-Schnittstelle an einen PC zu exportieren.