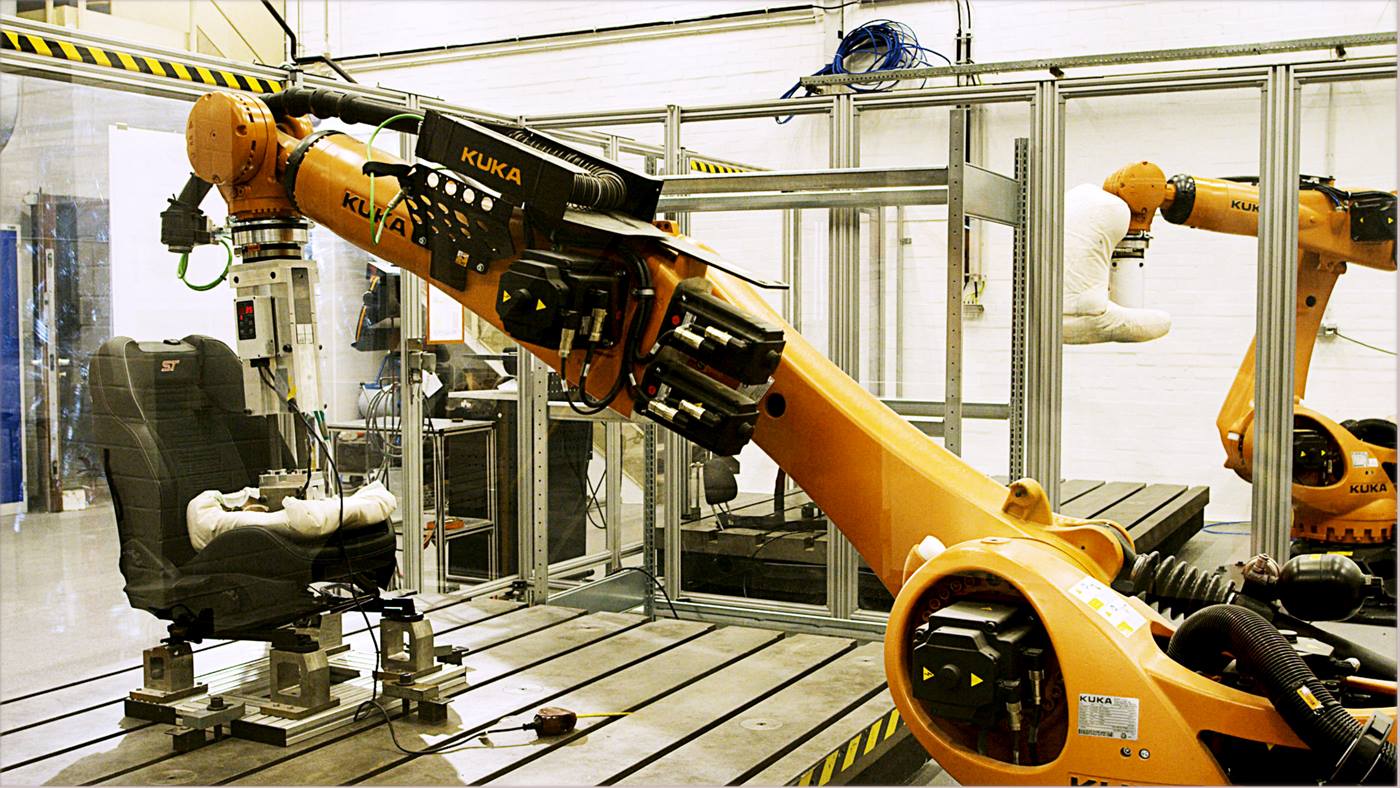
The functioning of the OccuBot
The OccuBot test system comprises a total of six components which simulate the motions and loads of a human body using force/torque sensors and dummies. This manner of testing enables the optimal reproduction of realistic and practical situations, such as egress and ingress movements.
The OccuBot also tests the wear of the material. For example, it uses continuous rotational motion to test how quickly the material on a seat back wears down.