Está utilizando una versión de Internet Explorar desfasada. Actualice su navegador para obtener una visualización óptima.
KUKA OccuBot: el sistema de prueba inteligente
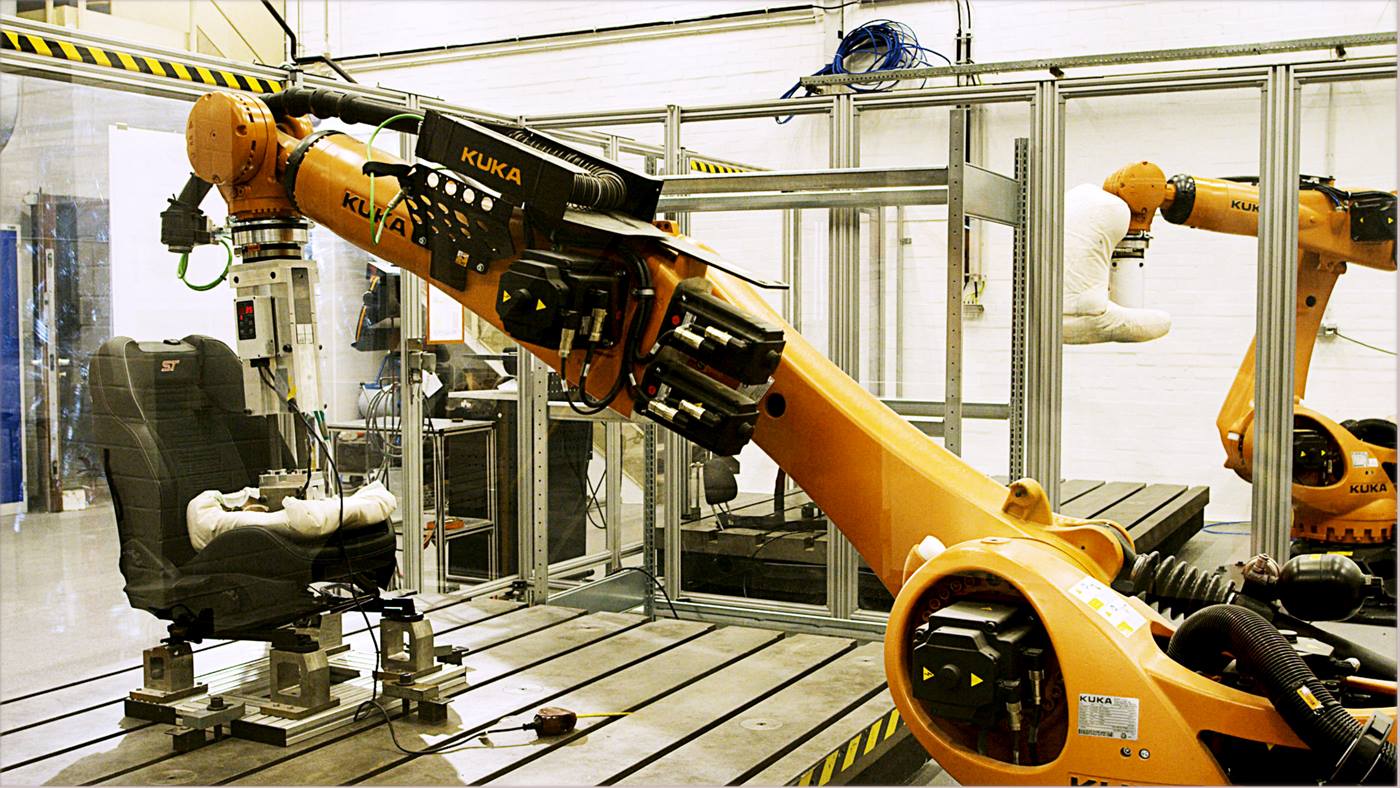
El KUKA OccuBot es un sistema de medición totalmente automatizado. Un robot de seis ejes controla con la máxima precisión el nivel de seguridad y estabilidad de asientos de vehículos terrestres y aeronaves bajo presión mecánica continua. En la industria de los muebles, se usa el OccuBot para inspeccionar muebles de asiento.
Así funciona el OccuBot
El sistema de prueba OccuBot consta en total de seis componentes que recrean movimientos y cargas humanas mediante sensores de momentos de fuerza y muñecos. Mediante este tipo de inspección se pueden recrear situaciones realistas y cercanas a la práctica, como por ejemplo el proceso de subirse y bajarse del coche.
Además, el OccuBot realiza pruebas de desgaste de material. Por ejemplo, mediante movimientos continuos de giro, comprueba el tiempo que tarda el tejido de un asiento en gastarse.
Ventajas del KUKA OccuBot
Máxima flexibilidad y precisión: Gracias a las seis dimensiones de medición, el OccuBot permite determinar fuerzas y momentos con la máxima flexibilidad y precisión. Recibirá datos sobre todas las fuerzas y momentos que actúen en la superficie del asiento con las que el muñeco entre en contacto.
Adaptación continua: En todos los ciclos de prueba por los que pasa el muñeco de pruebas, las fuerzas y los momentos se adaptan correspondientemente al desgaste de la forma. La interfaz de Ethernet le permite conectar un sistema externo de detección de datos. De esta forma puede supervisar el desgaste durante toda la vida útil y guardar los datos de prueba relevantes.
Parametrización sencilla y procesos eficientes: Las posiciones del muñeco se definen libremente mediante una marca de tiempo. Gracias a las curvas características, el robot puede desplazarse a todas las posiciones en un marco temporal determinado. Esto es posible gracias a las funciones más variadas, por ejemplo un editor para facilitar la definición del sistema de coordenadas básico, la función "Buscar/mantener" para fuerzas constantes o la edición de varios objetos de prueba.
El OccuBot en acción
Versátil en su aplicación: Además de la resistencia del asiento del vehículo, el OccuBot comprueba la capacidad de funcionamiento de la calefacción del asiento.
OccuBot: Componentes y volumen de suministro
El OccuBot consta de seis componentes. La interacción de estos componentes lo convierten en un sistema de prueba totalmente automatizado listo para su uso. Los siguientes componentes están integrados en el volumen de suministro:
El robot: KR 210 R2700 prime
El sistema de prueba KUKA OccuBot se basa en el KR 210 R2700 prime, un robot industrial de la serie KR QUANTEC. Sus seis ejes, que se pueden mover libremente por el espacio, permiten una flexibilidad máxima. Garantizan un alcance amplio de todas las posiciones de asiento ajustables y debido a su resistencia son perfectos para las exigentes condiciones de una prueba de carga continua.
El KR 210 R2700 prime de la serie KR QUANTEC forma la base del sistema OccuBot.
La unidad de control: KR C4 estándar ed 2015
El KR QUANTEC se controla mediante el componente adicional de sistema KR C4 ed 2015. Este sistema de control es un módulo de armario resistente, que además de sus estándares probados cuenta con un sensor de momento y fuerza especialmente adaptado al sistema de prueba OccuBot y una caja de sensores correspondiente.
La unidad de control KUKA KR C4 ed 2015 es el corazón del Occubot.
El sensor: Sensor de momento de fuerza FT-NET Omega 160
En el OccuBot, la medición de alta precisión de los movimientos realizados y las cargas se realiza mediante el sensor de momento de fuerza FT-NET Omega 160. El sensor se fija a la brida del KR QUANTEC. En un ciclo regular de 12 milisegundos, el sensor consulta los datos de la tecnología de medición y la posición del robot, los protocoliza y los sigue procesando.
El sensor FT-NET Omega 160 del OccuBot detecta todos los datos de medición en ciclos de 12 milisegundos.
El manejo: KUKA SmartPad
Gracias al KUKA SmartPad el manejo del OccuBot es especialmente sencillo y cómodo: Puede introducir la configuración de prueba para la prueba de asiento directamente en la programación. Gracias a su interfaz de usuario intuitiva y la pantalla antirreflectante grande de 8,4 pulgadas puede dirigir hasta ocho ejes sin realizar conmutaciones en colaboración con la unidad de control KR C4.
El KUKA smartPAD cuenta con un manejo muy sencillo y ofrece la máxima movilidad.
El muñeco: Muñeco KUKA Dummy OccuForm
Para una simulación lo más realista posible de las fuerzas y los momentos, en el procedimiento de prueba OccuBot se usa el muñeco KUKA Dummy OccuForm. Gracias a la medición precisa del sensor obtendrá datos exactos de todos los puntos en los que el muñeco está en contacto con la superficie del asiento. Gracias a una programación inteligente, las fuerzas estáticas del muñeco se autocompensan, de esta manera no se pueden generar fuerzas dinámicas adicionales.
Siempre ofrece el máximo rendimiento en las pruebas OccuBot: el muñeco KUKA Dummy OccuForm.
El software: KUKA.OccuBot 3.1
El software empleado en las pruebas de OccuBot, KUKA.OccuBot 3.1, incluye el software de aplicación KUKA.User Tech 3.2 y KSS 8.3. aparte de una herramienta de configuración. Ambos componentes son imprescindibles, de forma opcional también se puede instalar KUKA.DIS 3.0. Mediante este tercer software es posible registrar datos y exportarlos a un PC a través de una interfaz USB.