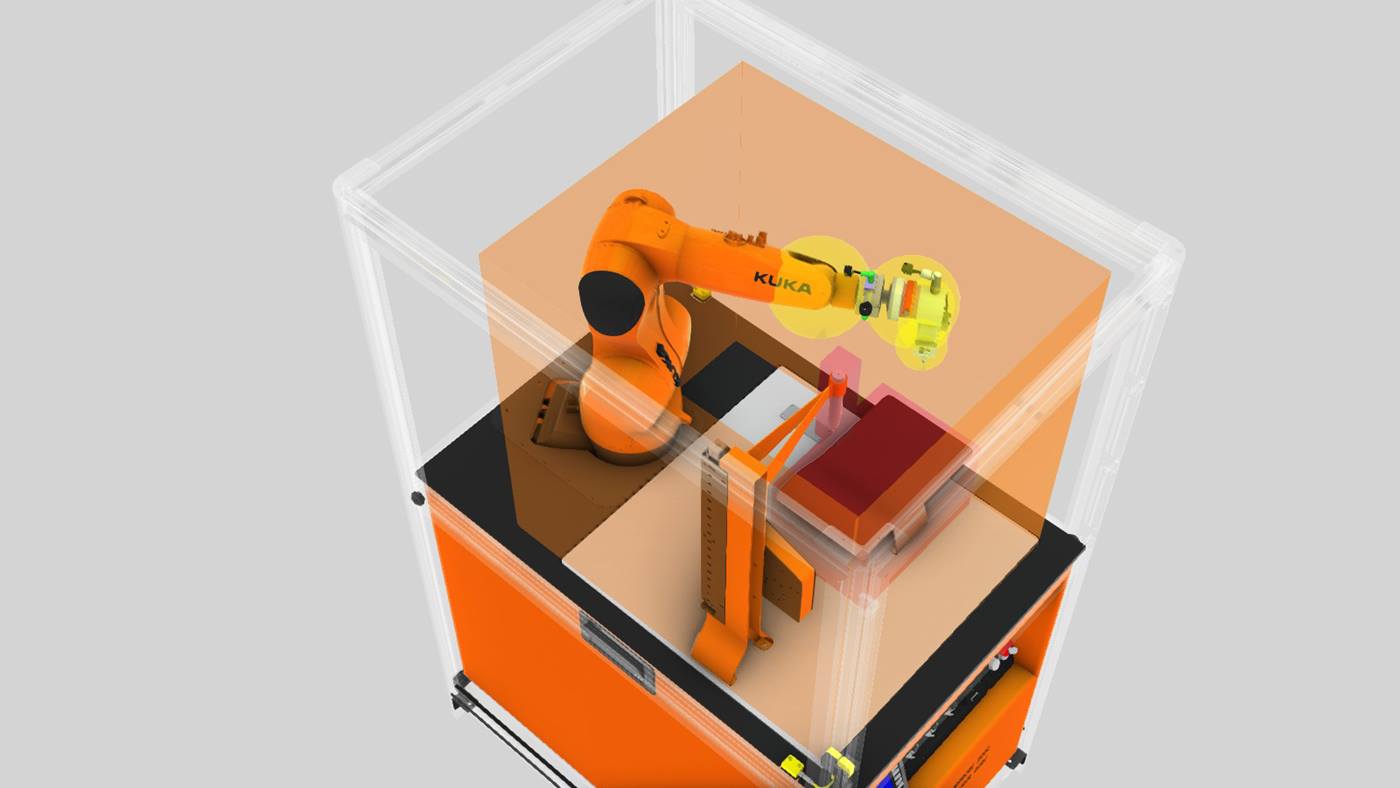
Espaces de surveillance avec KUKA.SafeOperation
La priorité est donnée à la sécurité. Le logiciel propose jusqu'à 16 espaces de surveillance et une zone de cellule fixe pour réduire de manière sûre l'espace de travail théorique. La définition de ces espaces de surveillance détermine le comportement du robot.
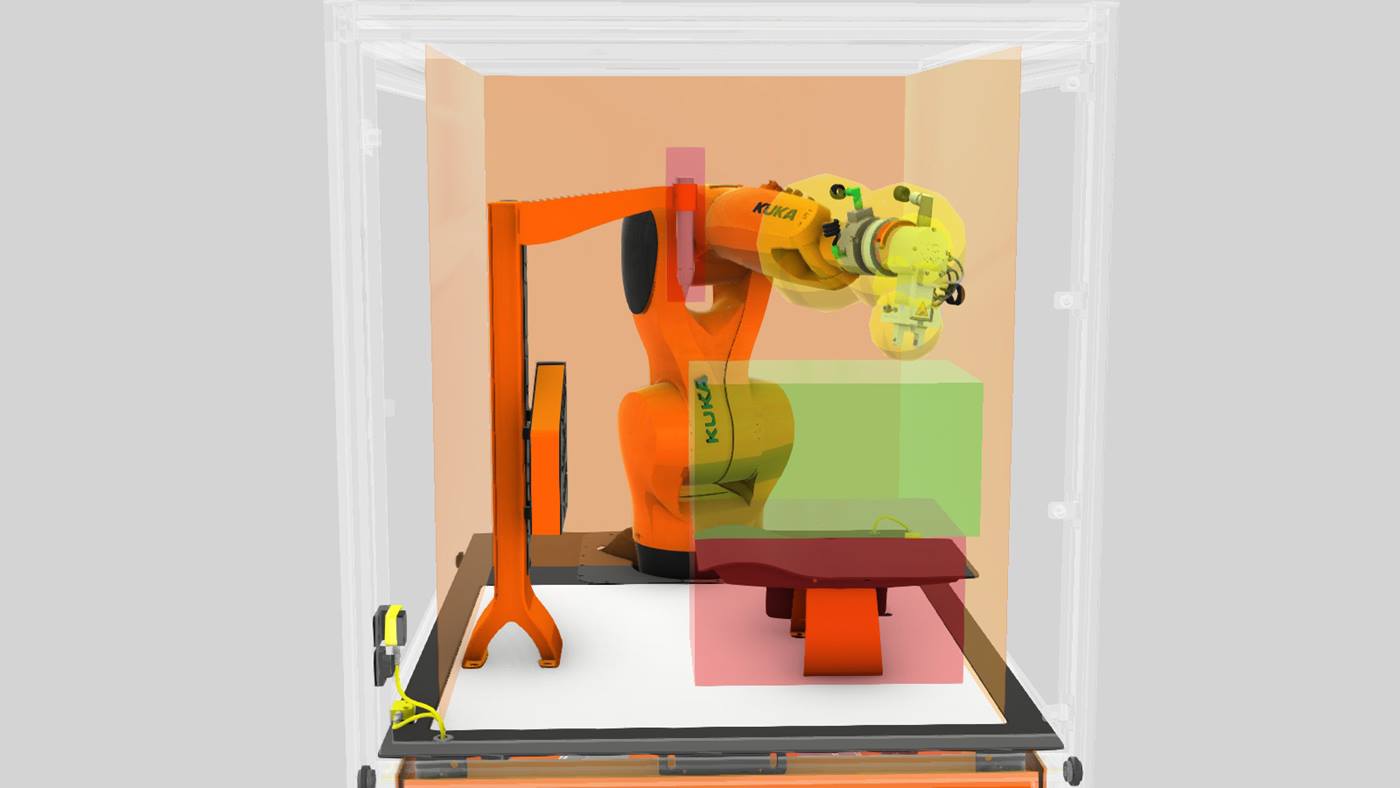
Chaque zone peut être déterminée individuellement. Faites votre choix entre une définition cartésienne ou spécifique aux axes. Vous faites également la différence entre ces types d'espaces :
- Zone de travail
- Zone de protection
- Zone de protection d'alarme (sans arrêt)
- Zone de travail d'alarme (sans arrêt)
- Zone de cellule (non commutable)