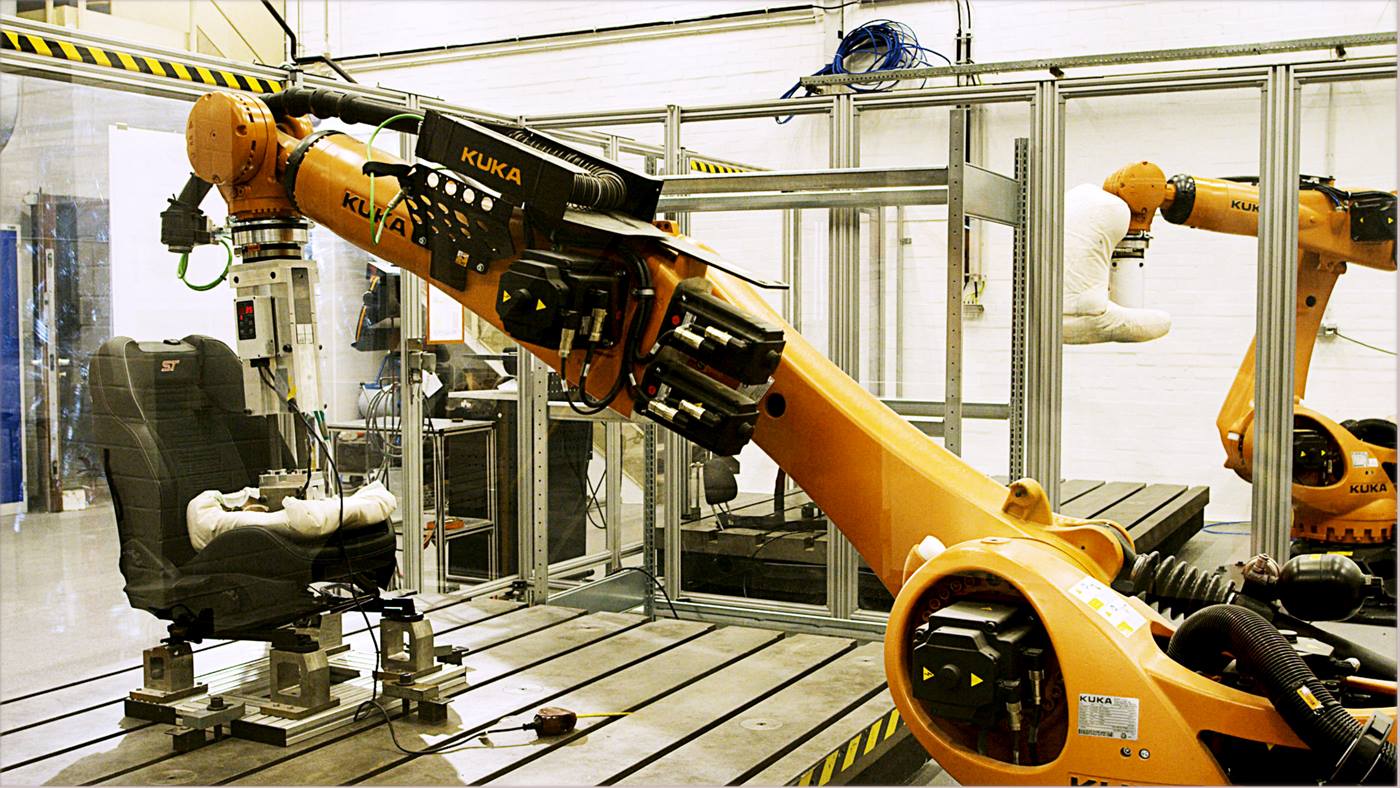
นี่คือการทำงานของ OccuBot
ระบบการทดสอบ OccuBot จะประกอบด้วยส่วนประกอบทั้งหมดหกส่วน ที่คอยติดตามการเคลื่อนไหวและการโหลดของมนุษย์ โดยการใช้เซ็นเซอร์วัดกำลังแรงบิดและใช้ดัมมี่ ด้วยรูปแบบของการทดสอบนี้จะสามารถดำเนินการตามสถานการณ์จริงและใกล้เคียงในภาคปฏิบัติได้ เช่น ทำซ้ำในการเข้าและในการออกได้อย่างสมบูรณ์แบบ
นอกจากนี้ OccuBot จะทำการทดสอบการสึกหรอของวัสดุอีกด้วย ด้วยเช่นนี้ มันจะทดสอบ ตัวอย่างเช่น โดยการเคลื่อนไหวแบบหมุนอย่างต่อเนื่อง จะทำให้การบุผ้าของเบาะที่นั่งถลอกออกได้รวดเร็วเท่าใด
ข้อได้เปรียบของ KUKA OccuBot
- มีความยืดหยุ่นและแม่นยำสูงสุด:
โดยการวัดในหกมิติ ด้วยความช่วยเหลือของ OccuBots จะสามารถทำการตรวจจับกำลังและแรงบิดได้อย่างยืดหยุ่นและทีความแม่นยำสูงสุด ซึ่งจะเป็นการให้ข้อมูลที่เกี่ยวกับกำลังและแรงบิดทั้งหมดที่เกิดขึ้นในพื้นที่สัมผัสระหว่างดัมมี่กับที่นั่ง - การปรับให้เหมาะสมอย่างต่อเนื่อง:
ในทุก ๆ รอบการทดสอบซึ่งดำเนินการโดยใช้ดัมมี่ จะมีการปรับกำลังและแรงบิดตามการสึกหรอของรูปทรงให้เหมาะสม อินเตอร์เฟสอีเทอร์เน็ตจะช่วยให้คุณสามารถแนบไปที่ระบบเก็บข้อมูลภายนอกได้ ซึ่งจะทำให้คุณสามารถเฝ้าระวังการสึกหรอผ่านระยะเวลาการทดสอบทั้งหมดได้และทำการบันทึกข้อมูลการทดสอบที่เกี่ยวข้องนั้นไว้ - การตั้งค่าพารามิเตอร์ที่ง่ายดายและกระบวนการที่มีประสิทธิภาพ:
ตำแหน่งของดัมมี่จะถูกกำหนดได้อย่างอิสระบนพื้นฐานของการประทับเวลา ต้องขอขอบคุณเส้นกราฟ หุ่นยนต์จะสามารถเคลื่อนย้ายไปยังทุก ๆ ตำแหน่งในลำดับเวลาที่กำหนดไว้ได้อย่างแม่นยำ สิ่งเหล่านี้จะสามารถทำให้เป็นไปได้ด้วยฟังก์ชั่นที่แตกต่างกัน ตัวอย่างเช่น โปรแกรมแก้ไขสำหรับการกำหนดระบบพิกัดฐานแบบง่าย ฟังก์ชัน "การค้นหาและระงับ" สำหรับกำลังที่มีค่าคงที่ หรือการประมวลผลวัตถุจำนวนมากที่ใช้ทดสอบ
OccuBot: ส่วนประกอบต่าง ๆ และข้อกำหนดในการจัดส่ง
OccuBot จะประกอบด้วยส่วนประกอบหกส่วน การทำงานร่วมกันของมัน จะทำให้มันเป็นระบบการทดสอบที่สามารถใช้งานได้โดยตรงที่ทำงานในแบบอัตโนมัติเต็มรูปแบบ ส่วนประกอบดังต่อไปนี้จะถูกรวมอยู่ในข้อกำหนดในการจัดส่ง:
การควบคุม: KR C4 ed 2015 แบบมาตรฐาน
KR QUANTEC จะถูกควบคุมโดยส่วนประกอบระบบเพิ่มเติม KR C4 ed 2015 สำหรับระบบการควบคุมนี้จะหมายถึงโมดูลตู้ที่ทนทานซึ่งนอกจาก มาตรฐานที่ได้รับการพิสูจน์ของมันแล้ว จะประกอบด้วย ระบบการทดสอบ OccuBot ในแบบพิเศษที่เข้ากันได้พอดีกับเซ็นเซอร์กำลังและแรงบิด และกล่องเซ็นเซอร์ที่เกี่ยวข้องกัน
 การควบคุม KR C4 ed 2015 ของ KUKA จะเป็นหัวใจสำคัญของ OccuBot
การควบคุม KR C4 ed 2015 ของ KUKA จะเป็นหัวใจสำคัญของ OccuBot
เซ็นเซอร์: เซ็นเซอร์กำลังและแรงบิด FT-NET Omega 160
การวัดที่มีความแม่นยำสูงที่คอยติดตามการเคลื่อนที่และการโหลด สำหรับ OccuBot จะถูกดำเนินการโดย เซ็นเซอร์กำลังและแรงบิด FT-NET Omega 160 มันจะถูกติดไว้ที่หน้าแปลนของ KR QUANTEC โดยเป็นรอบระยะที่สม่ำเสมอที่สิบสองมิลลิวินาที เซ็นเซอร์จะสอบถามไปที่ข้อมูลเทคนิคการวัดและข้อมูลตำแหน่งของหุ่นยนต์ ทำเป็นโปรโตคอล และทำการประมวลผลมันต่อไปทันที
 เซ็นเซอร์ OccuBot รุ่น FT-NET Omega 160 จะทำการตรวจสอบข้อมุลการวัดทั้งหมดภายในรอบระยะเวลา 12 มิลลิวินาที
เซ็นเซอร์ OccuBot รุ่น FT-NET Omega 160 จะทำการตรวจสอบข้อมุลการวัดทั้งหมดภายในรอบระยะเวลา 12 มิลลิวินาที
ดัมมี่: KUKA Dummy OccuForm
สำหรับการจำลองที่เหมือนจริงมากที่สุดของกำลังและแรงบิดที่เกิดขึ้น จะมีการนำเอา KUKA Dummy OccuForm มาใช้งานในขั้นตอนการทดสอบของ OccuBot ต้องขอขอบคุณการวัดที่แม่นยำของเซ็นเซอร์ คุณจะได้รับข้อมูลที่แม่นยำในทุก ๆ จุดที่ดัมมี่มีการสัมผัสกับพื้นผิวที่นั่ง โดยการตั้งโปรแกรมที่ชาญฉลาดทำให้สามารถชดเชยแรงสถิตย์ของดัมมี่ได้ด้วยตัวเอง – ด้วยวิธีการนี้ทำให้ไม่เกิดแรงทางไดนามิกเพิ่มเติม
 ในทุก ๆ การทดสอบ OccuBot มันจะถูกนำมาใช้งานอย่างเต็มที่: KUKA Dummy OccuForm
ในทุก ๆ การทดสอบ OccuBot มันจะถูกนำมาใช้งานอย่างเต็มที่: KUKA Dummy OccuForm
ซอฟต์แวร์: KUKA.OccuBot 3.1
ซอฟต์แวร์ที่ใช้สำหรับการทดสอบ OccuBot KUKA.OccuBot 3.1 นอกจากจะประกอบด้วยเครื่องมือการกำหนดค่าแล้วยังจะมีซอฟต์แวร์แอพลิเคชัน KUKA.User Tech 3.2 และ KSS 8.3 เพิ่มเติมอีกด้วย ส่วนประกอบทั้งสองมีความจำเป็นอย่างยิ่งที่จะต้องใช้ นอกจากนี้โดยเป็นตัวเลือกจะสามารถทำการติดตั้ง KUKA.DIS 3.0 ได้อีกด้วย ด้วยซอฟต์แวร์ในแบบที่สามนี้จะช่วยให้สามารถทำการแสดงผลข้อมูลและทำการส่งออกไปยังคอมพิวเตอร์เครื่องหนึ่งผ่านทาง อินเตอร์เฟส USB ได้