ขอบเขตการใช้งานของซอฟต์แวร์
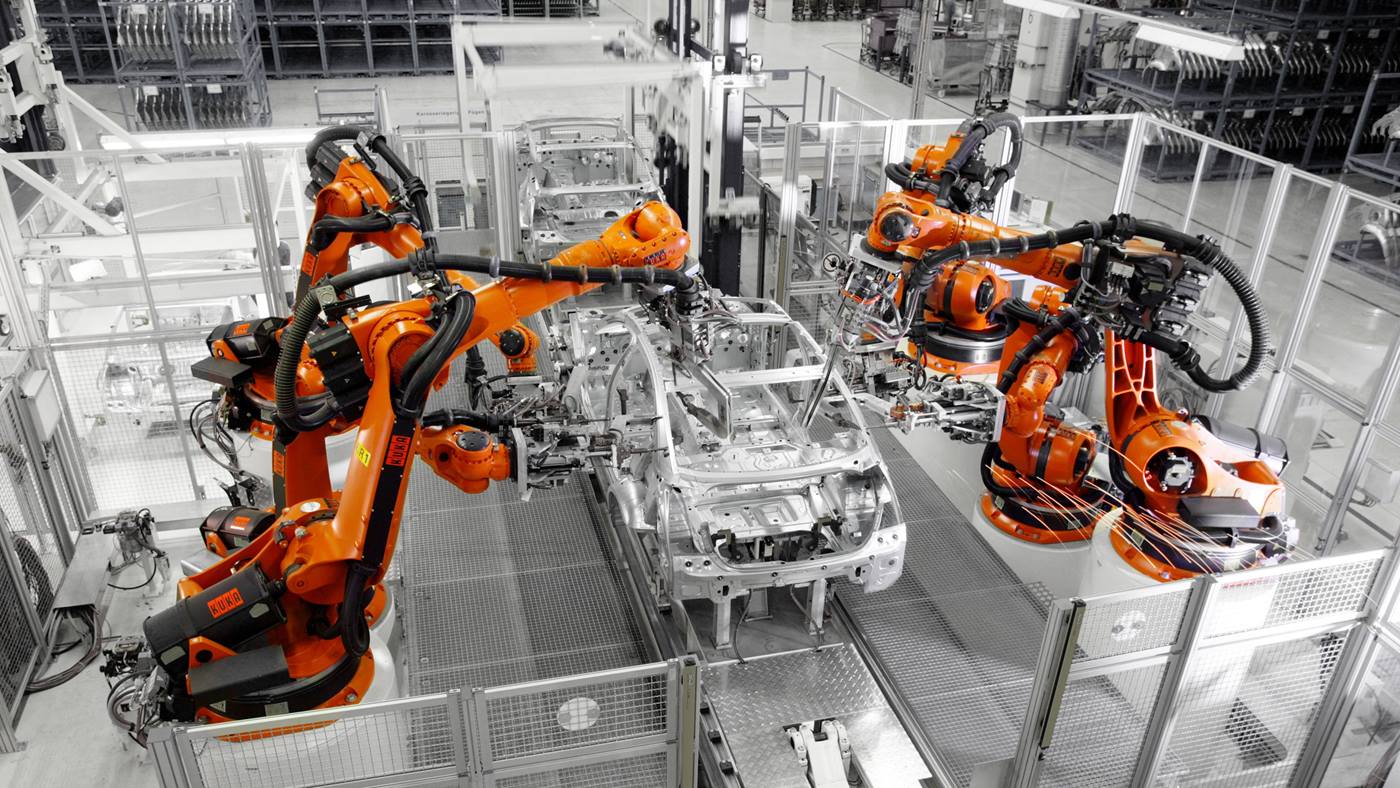
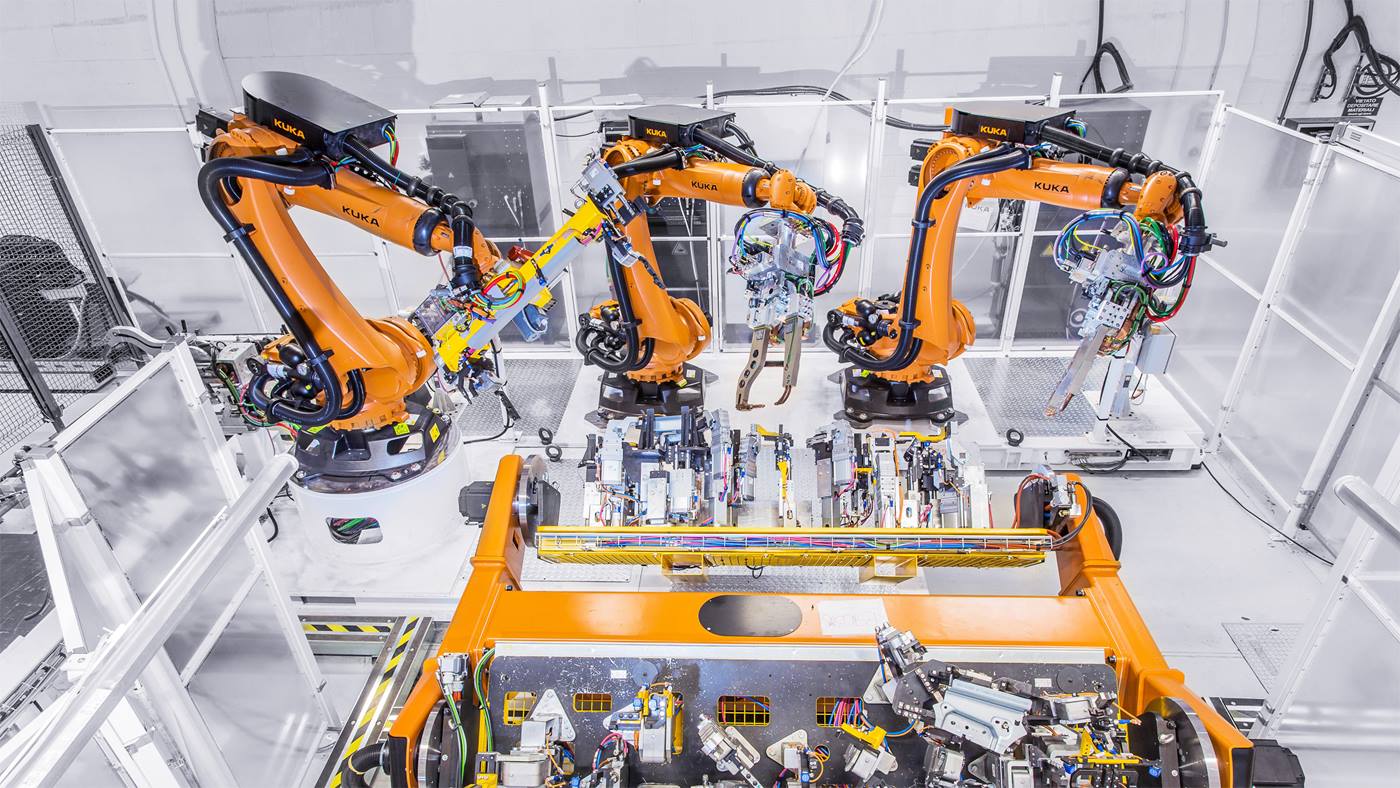
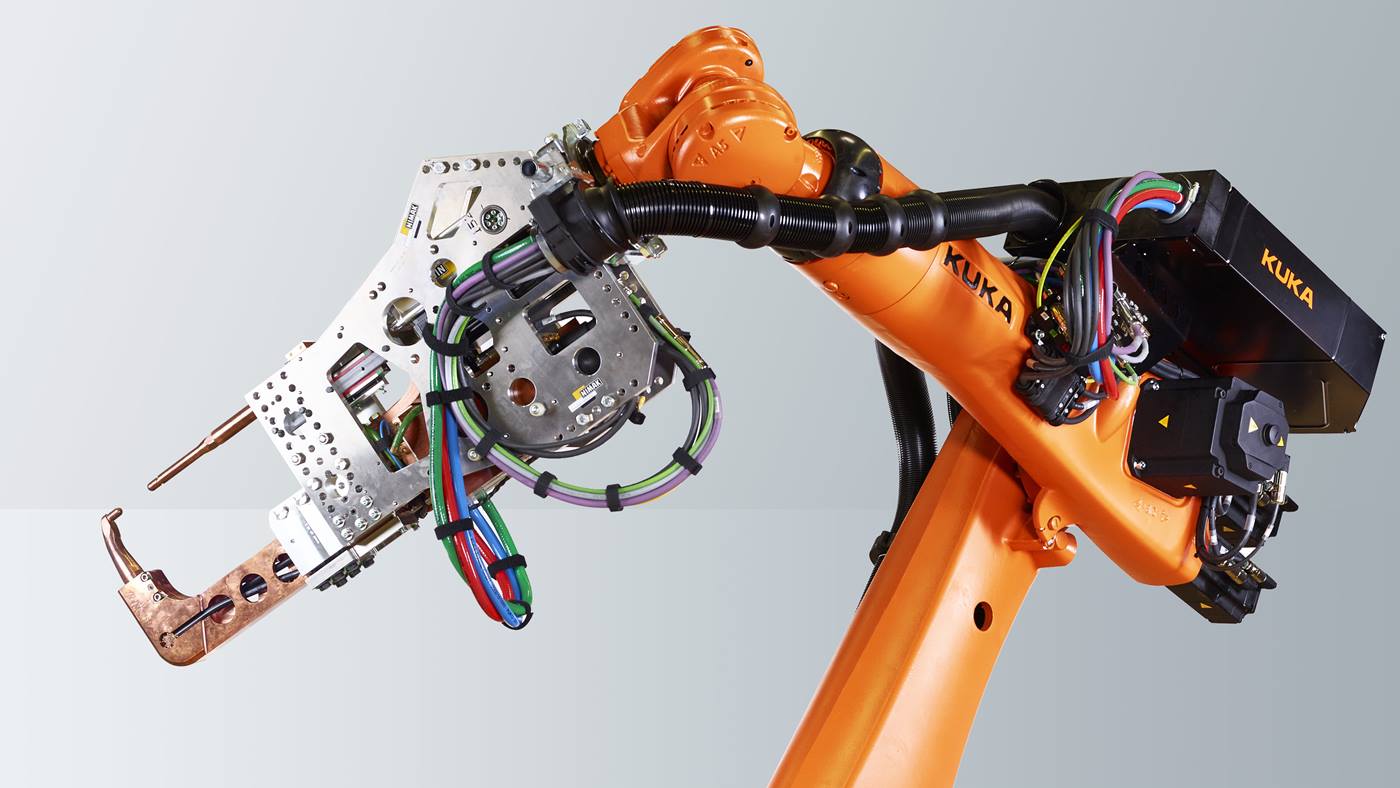
KUKA.Gripper&SpotTech 4.0 ช่วยให้ระบบหุ่นยนต์สามารถควบคุมและเฝ้าสังเกตเครื่องมือและมือจับที่อยู่ในสภาพแวดล้อมการทำงานนั้น ๆ ได้ ขอบเขตการใช้งานที่เป็นรูปธรรม คือ การขนถ่ายวัสดุ และการเชื่อมแบบจุดด้วยปืนเชื่อมระบบนิวเมติกส์ ภาระกิจในการขนถ่ายวัสดุด้วยหุ่นยนต์ของ KUKA จะถูกตั้งโปรแกรมได้อย่างรวดเร็วและสะดวก
ฟังก์ชั่นการทำงานของ KUKA.Gripper&SpotTech 4.0
- มือจับที่มีการกำหนดตั้งค่าอย่างอิสระ 16 แบบ
- โปรแกรมการเชื่อมโลหะที่มีการกำหนดตั้งค่า 256 แบบ
- มีการเฝ้าสังเกตเงื่อนไขของมือจับแบบคงที่และแบบไดนามิก
- สัญลักษณ์ของมือจับที่ผู้ใช้กำหนดได้เองโดยไม่มีขีดจำกัด
- งานในการแก้ไขข้อผิดพลาดที่ทำเป็นกิจวัตร ซึ่งตั้งโปรแกรมได้อย่างอิสระ
- อินเตอร์เฟสภาพกราฟิกควบคุมการทำงานพร้อมไฟควบคุม หน้าจอแสดงสถานะและระบบการปรับการทำงานให้เหมาะสมแบบออนไลน์
- การปรับการทำงานให้เหมาะสมผ่าน WorkVisual 4.0 สำหรับองค์ประกอบที่เกี่ยวข้องกับการผลิตบน smartPad
ข้อกำหนดความต้องการของระบบสำหรับ Gripper&SpotTech 4.0
KUKA.GripperSpotTech 4.0 คือ ผลิตภัณฑ์เลียนแบบ GripperSpotTech 3.x และมีฟังก์ชั่นการทำงานเพิ่มขึ้นมากมาย ด้วยเหตุนี้ จึงใช้งานไม่ได้กับเวอร์ชั่นก่อนหน้า