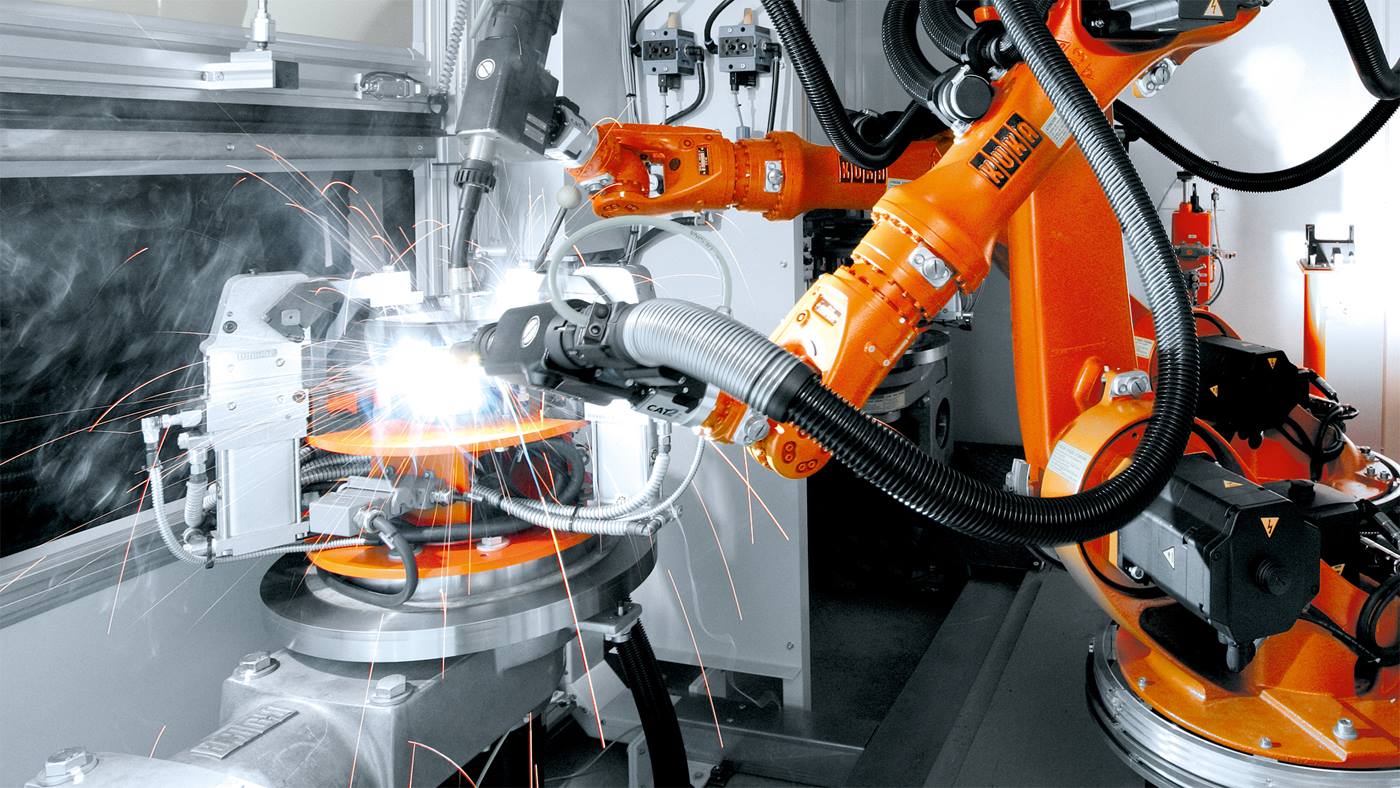
简单地配置电源
焊接电源预配置确保高度兼容所有常用电源,方便集成。灵活的设计使得通过工作/编程运行(以程序号规定额定值)或者特性曲线/信道运行(以多个焊接参数规定额定值)控制电源成为可能。
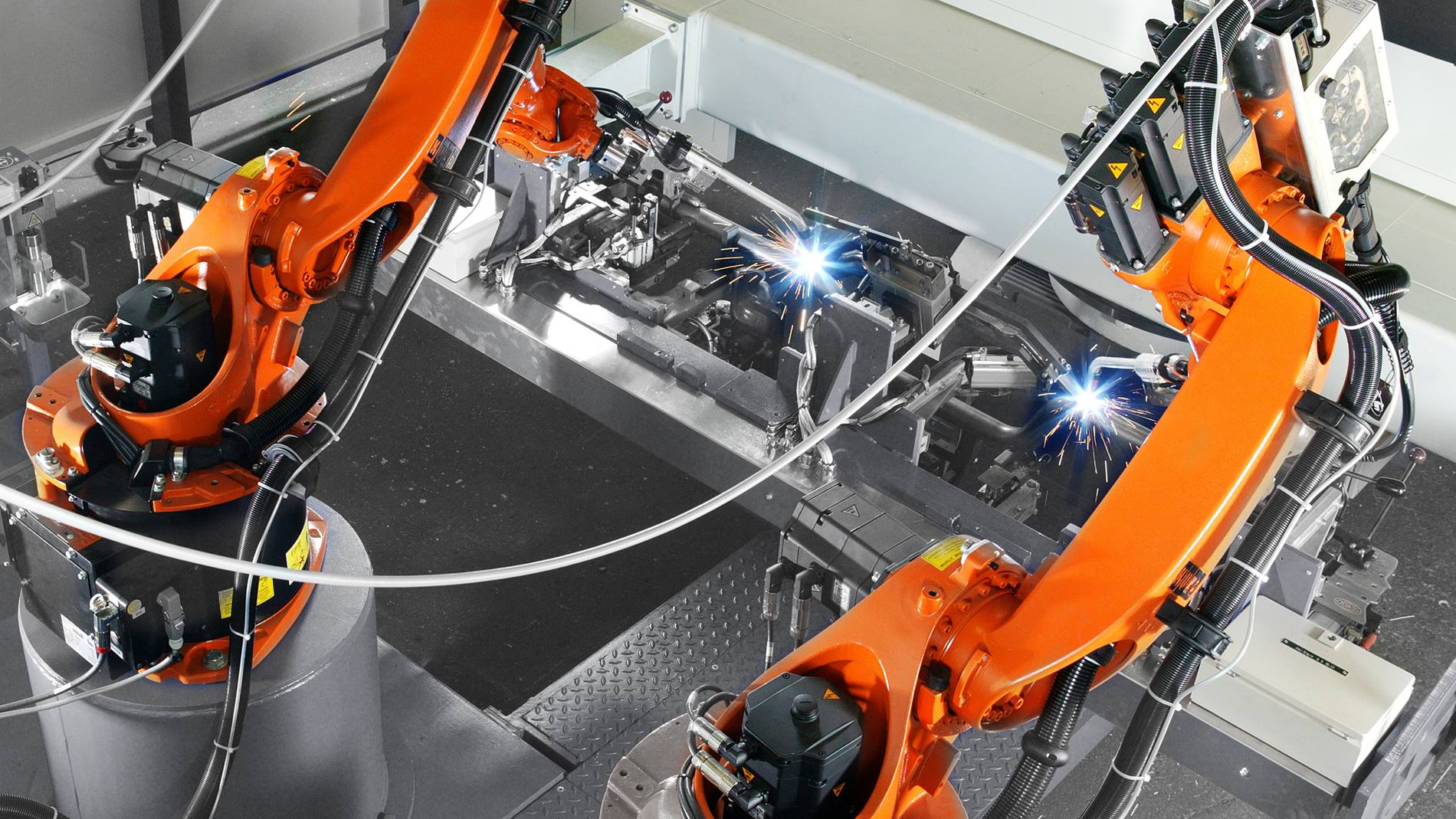
机器人控制器通过现场总线与电源进行通讯,例如通过标配的 EtherCAT。在此,通过 KUKA.WorkVisual 和预定义配置,例如用于 Binzel、ESAB、EWM Fronius、Kemppi、Megmeet、Miller、Lincoln、Lorch 和 SKS 电源,只需点击一下鼠标即可轻松创建焊接系统的整体配置。根据您的需要,通过单独设置参数优化您的配置。