The KUKA.ArcTech family has a modular design in order to flexibly provide the required functions for the welding task to be accomplished.
The product family includes the following software options:
- KUKA.ArcTech Basic
- KUKA.ArcTech Advanced
- KUKA.ArcSense
- and KUKA.MultiLayer.
KUKA.ArcTech Basic software
KUKA.ArcTech Basic is the basic module of the product family. It comprises all the necessary functions to perform all standard welding tasks. It makes no difference whether the power source to be controlled is a MIG/MAG, TIG or plasma device.
Easy configuration of power sources
Preconfigured welding source profiles ensure high compatibility with all common power sources and enable uncomplicated integration. The flexible design enables control of power sources via job/program mode (setpoint values via program numbers) or characteristic/channel mode (setpoint values via several weld parameters).
The robot controller communicates with the power source via the field bus, e.g. the EtherCAT available as standard. With just a single mouse click, the holistic configuration is conveniently created with KUKA.WorkVisual and predefined configurations for power sources (e.g. for Binzel, ESAB, EWM, Fronius, Kemppi, Megmeet, Miller, Lincoln, Lorch and SKS). Optimize your configuration to meet your requirements by means of customized parameterization.
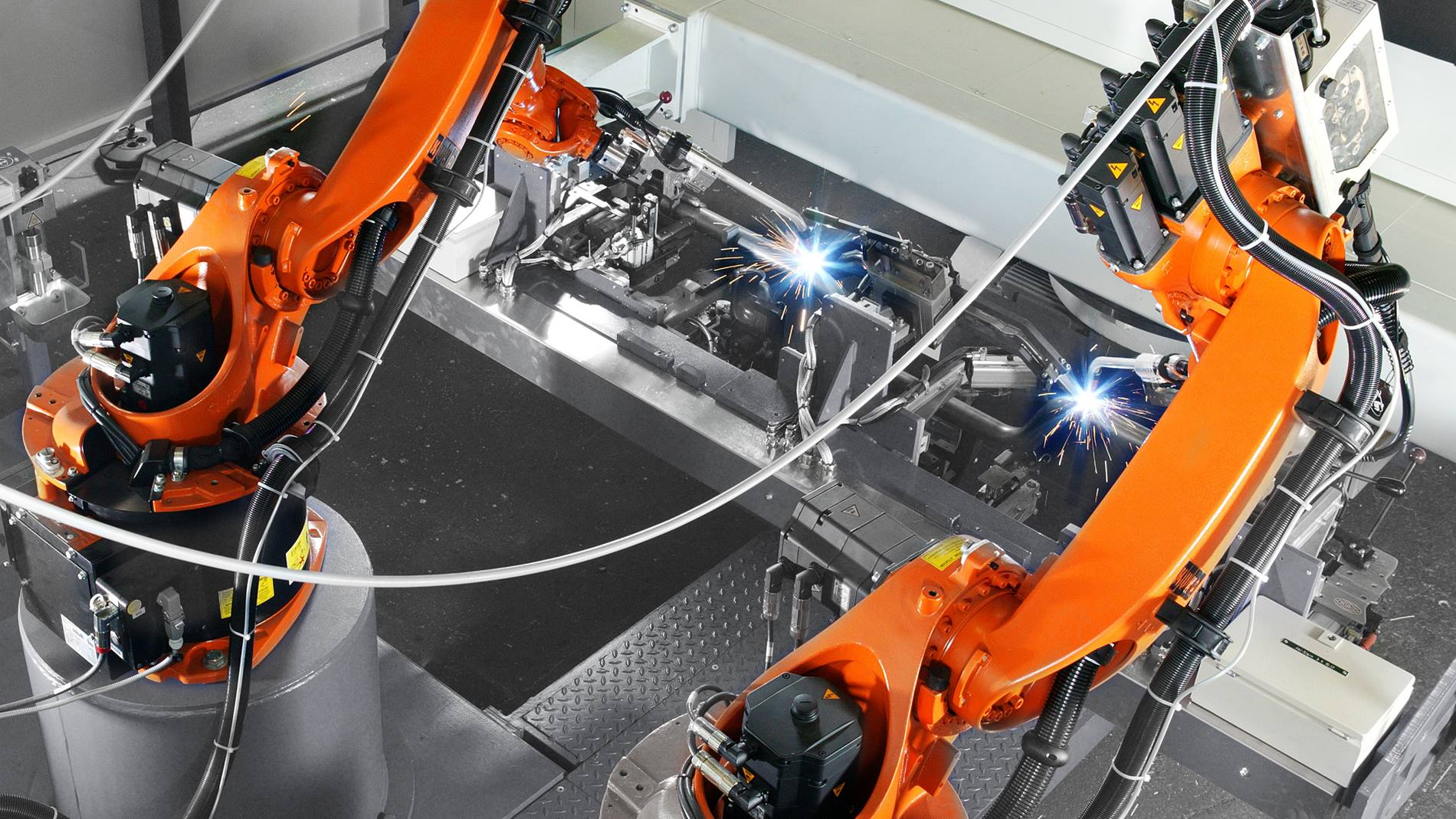
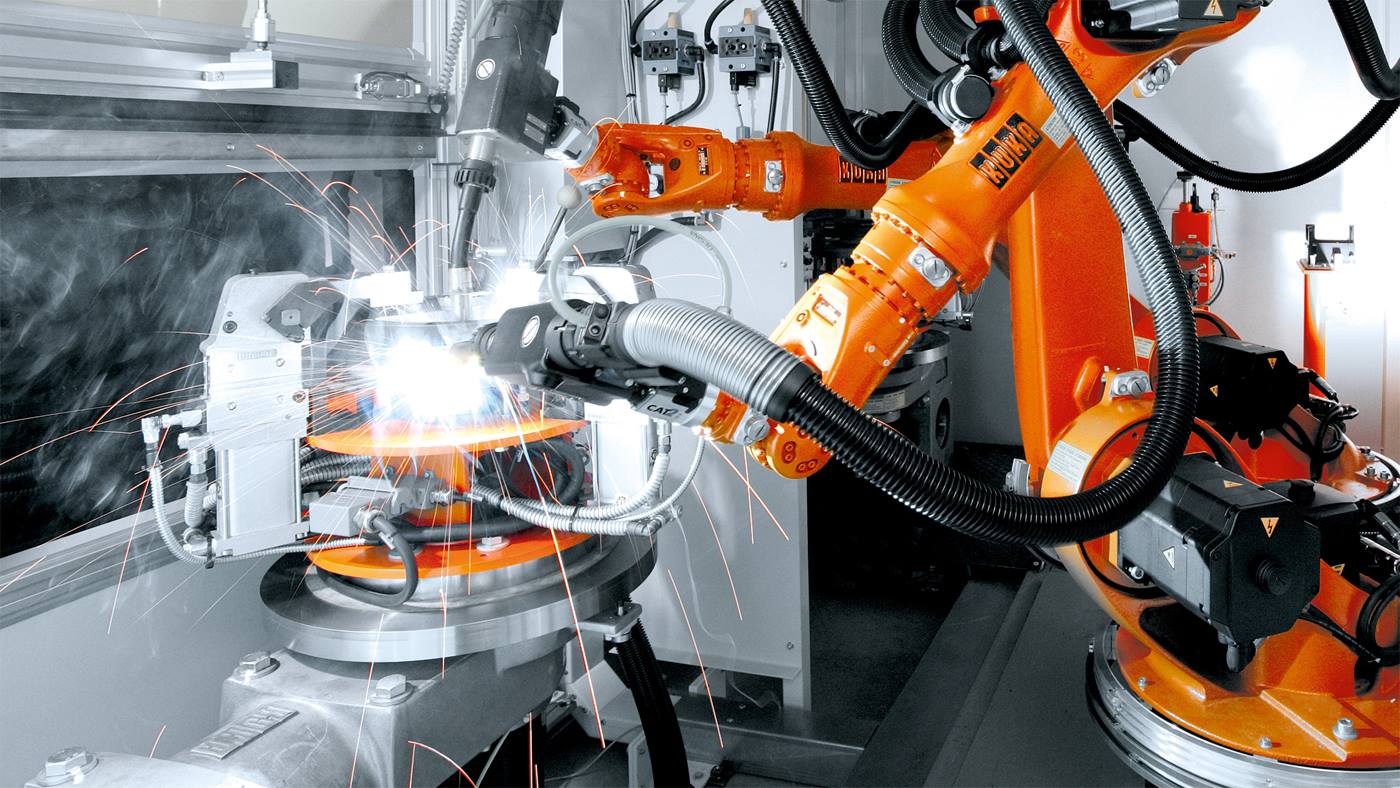
KUKA.ArcTech welding software is modular in structure and can be adapted to your needs.
The option packages offer a wide range of functions to allow for easy operation of arc welding processes as well as efficient and fast programming. This enables targeted implementation of a broad variety of requirements for the arc welding process.