透過 KUKA.RoboTeam 軟體實現的時間和幾何耦合
機器人的時間耦合
藉由於 KUKA.RoboTeam 軟體,傳統的中央 PLC 功能,例如工作區閉鎖或程式同步等,被直接置入機器人團隊中。這樣,機器人團隊直接涉及的所有任務單獨由此軟體承擔。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果
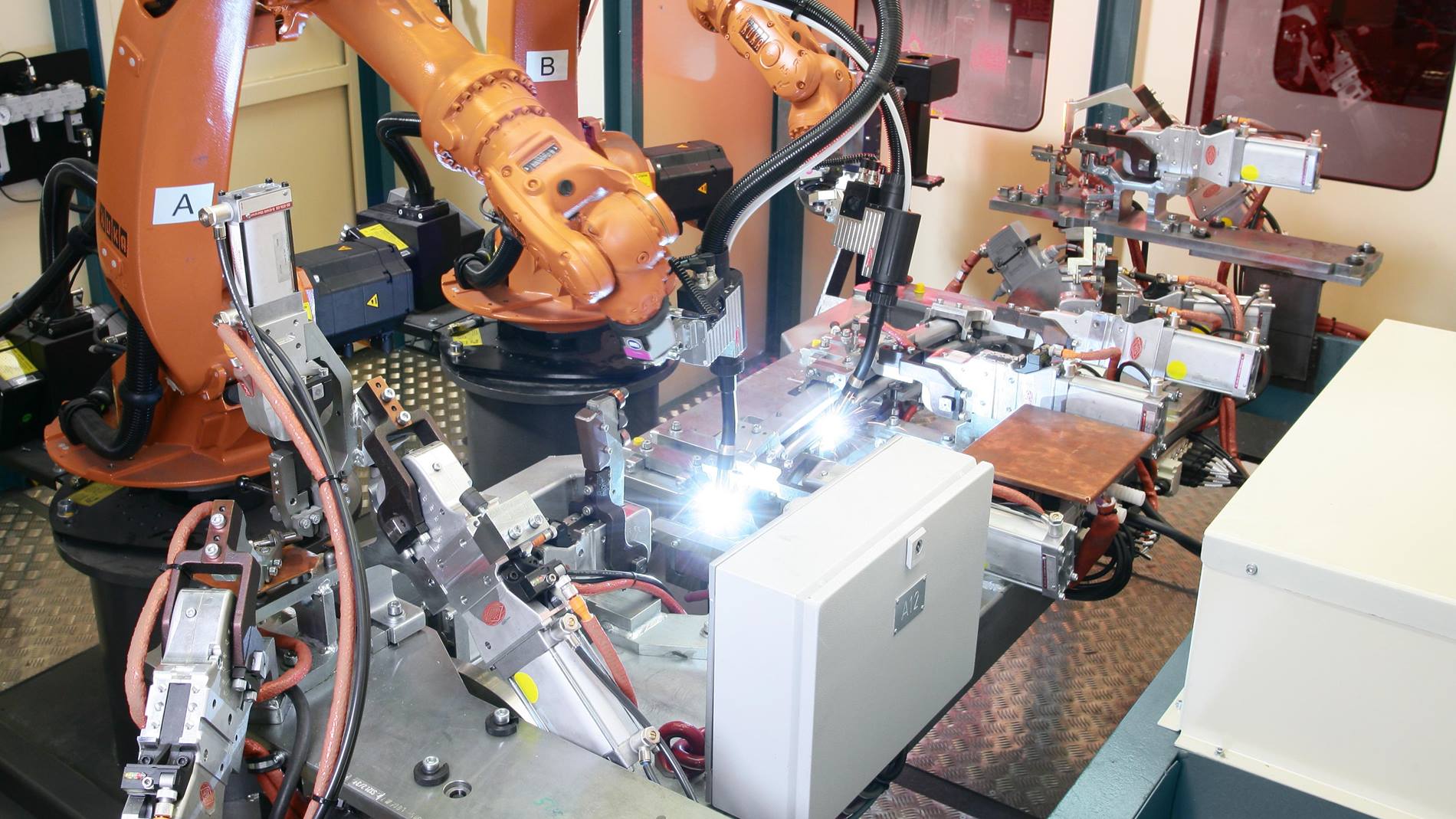
透過 KUKA.RoboTeam 可實現最多四台機器人以團隊形式進行協同作業。此外,機器人還可以與附加軸運動系統(例如工件定位器或機器人線性軸)進行同步,以便執行在時間和幾何上協調的運動。
藉由於 KUKA.RoboTeam 軟體,傳統的中央 PLC 功能,例如工作區閉鎖或程式同步等,被直接置入機器人團隊中。這樣,機器人團隊直接涉及的所有任務單獨由此軟體承擔。
多台機器人的軌道和運輸的幾何耦合可與不同的加工過程相連。這可能實現現代化的流水線生產,並能確保顯著縮短時間週期。幾何耦合的機器人具有高度的靈活性,可以解決重量級搬運範疇內的所有搬運作業,並能保證以最佳化流程的方式將形狀不穩定的工件定位。藉由於此功能還可以讓加工過程和材料運送平行作業。

程式同步:兩個或多個機器人的同步運動開始
運動同步:兩個或多個機器人的同步運動時間
負載分配的作業方式:兩個或多個機器人的同步作業
依賴於加工過程的作業方式:兩個或多個機器人在一個加工過程中的合作
組合式作業方式:負載分配的作業方式和依賴於加工過程的作業方式的組合
擴展的主、輔機器人原理:兩個或多個機器人與附加軸運動系統的同步作業




