The industrial robot : What is it?
An industrial robot, as defined by the International Organization for Standardization, is an automatically controlled, multi-active, versatile and programmable system that consists of three or more axes. There are two types of robots: Cartesian robots and poly-articulated robots.
Each robot has its own characteristics and technologies. The most important of these are the range of actions and the maximum load capacity, which sets the limits of the machine's capability. These elements allow you to choose the most suitable
industrial robot. It is possible to improve the performance of a robot with additional axes:
linear axes,
positioners or to move it with a
mobile platform.
A robotic system has three major components:
-
A mechanical part: the arm itself which is composed of motors on each axis.
-
An electronic part: the control cabinet with its central unit which ensures the servo control, its sensors and speed variators.
-
A computer part: in the form of a specific programming language that allows the robotic machine to be controlled by linking it to its user and its environment. This computer part includes a calculator that converts the coded motor data into Cartesian values.
What is the purpose of an industrial robot?
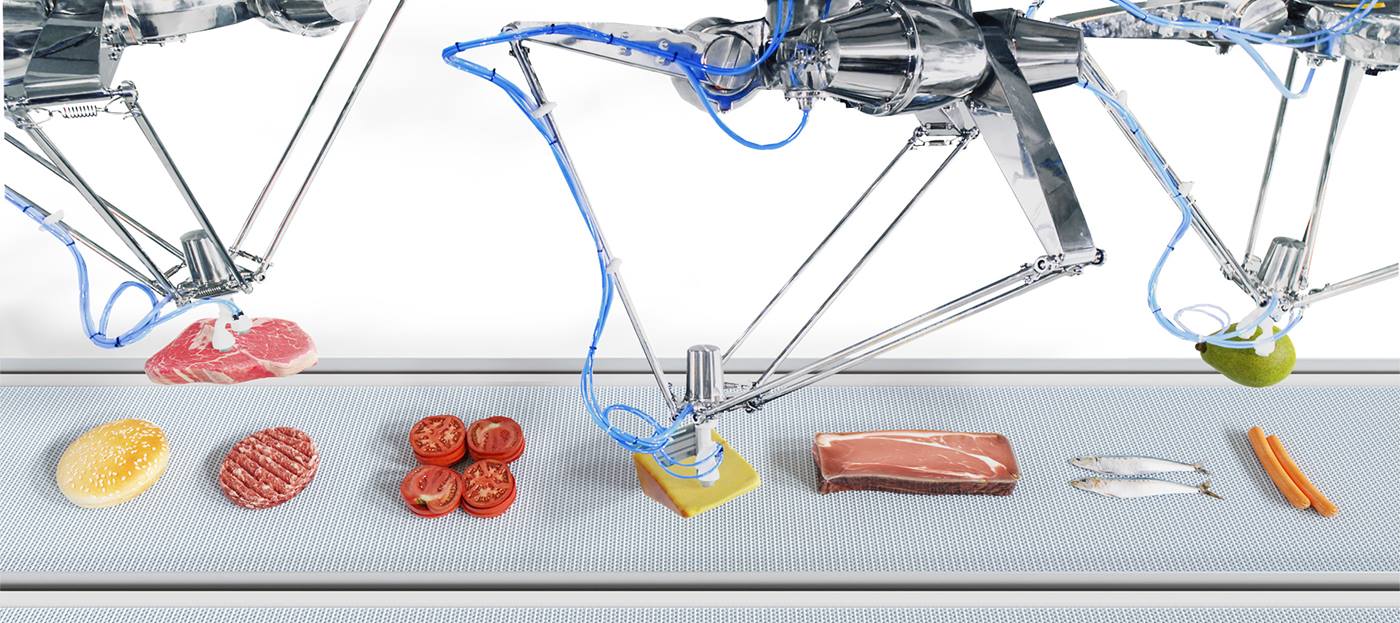
Applications in robotics are used as a major tool in many industries such as automotive, food processing, electronics, metallurgy, plastics manufacturing but also in the medical sector. The robotic arm is suitable for many different applications depending on its essential characteristics and the tool at its disposal. The main applications are :
Advantages of use
Industrial robots bring a speed of execution in a manufacturing environment superior to the human and a durable precision over time. Factoring in their high accuracy levels, industrial robots are capable of high quality production and executing more precise and reliable processes. A high product quality results in a decrease in time taken for quality control checks to determine if the products are of the desired standards.
Thus, many advantages result from the use of automation technology:
-
Improvement of the output
-
Maximization of production
-
Optimization of quality
-
Almost perfect and repeatable precision
-
Reduction of risks for employees
-
Improved working conditions: less RSI
-
Certainty of consistency of rate and process
-
Increased flexibility
How to choose the best robot system?
The best robot will be the one that best meets the specific needs of a manufacturing project. To do so, it is important to know some key criteria as there are different types of robots:
When integrating an industrial robot, a classic or collaborative robot, safety is a necessity and therefore it is essential to perform a risk analysis beforehand. Especially cobots that work in the same environment as humans in order to combine human capabilities with the efficiency of machines require a lot of safety precautions. Once you have these elements in mind, you can carry out research or use this tool which will calculate the industrial automaton best suited for your needs.
Alternatively, you can contact our experts directly for personalized support. In short, there is no such thing as the best robot, but robotic arms exist for all situations and applications.