Az Internet Explorer kereső egy régebbi verzióját használja. Az optimális megjelenítés érdekében kérjük, frissítse keresőjét.
A KUKA-val az Ipar 4.0 jövőjébe
Mit jelent az Ipar 4.0 jövője? Egy dolog biztos: a jövő már elkezdődött. A mesterséges intelligencia belép a gyártásba. A gépek elkezdik az önálló tanulást és önállóan képesek lesznek növelni a gyártás hatékonyságát, valamint a fizikai és digitális világ egyre inkább összemosódik.
Ipar 4.0: Pillantás a jövőbe
Az Ipar 4.0 fogalma már több éve létezik. A hozzá kapcsolódó technológiákat (például a dolgok internete, a felhőalapú számítástechnika vagy a mesterséges intelligencia (Artificial Intelligence, AI)) sem tegnap találták fel. Ennek ellenére az ágazat szinte naponta jelentős műszaki fejlődést ér el. Ebben elsősorban három trend rajzolódik ki.
A mesterséges intelligencia (AI) már jelenleg is a digitális átállás egyik hajtóereje - és a jövőben még inkább azzá válik. A mesterséges intelligenciának köszönhetően a gépek képesek lesznek előrelátó módon elvégezni a karbantartást. A Smart Factory-ban alkalmazott robotok olyan autonóm asszisztensekké válnak, akik önállóan tanulnak, logikusan cselekednek és képesek egymással kommunikálni.
A Machine Learning (gépi tanulás), az MI ágazatnak a KUKA szempontjából egyik legfontosabb területe is megtalálja az útját a gyárakba és nemsokára a Smart Factory koncepció szerves részét fogja alkotni. A tanuló gépek a képesek „megérteni” a saját maguk által létrehozott mintákat és az ok-okozati kapcsolatokat. Tehát „tanulnak”, és valós időben reagálnak rá, hiszen önállóan finomítják algoritmusaikat.
Nem kevésbé forradalmi a Mixed Reality (vegyes valóság) alapelve. Ez egyesíti a virtuális valóság (VR) és a kibővített valóság (AR) technológiáit. A virtuális valóság azt jelenti, hogy a felhasználó teljesen le van választva a való világtól és egy virtuális környezetben van, amelyet egy szemüvegen keresztül lát. A kibővített valóság esetében azonban a valós környezet látható marad, azonban digitális tartalmak (virtuális objektumok, információk) jelennek meg benne. A vegyes valóság technológiájával virtuális tartalmak kapcsolhatók össze a való világgal. A kiterjesztett valósággal ellentétben a kevert valóságban (MR) a tartalmak nem egyszerűen vetítve jelennek meg, hanem mobil végeszközök vagy fejre szerelt kijelzők (pl. Microsoft Hololens) segítségével hologramként jelennek meg, amely valósághűen kapcsolódik a fizikai világhoz. Úgy lehet mozgatni és módosítani, mintha valódi objektum lenne.
A jövő tehát már elkezdődött. Milyen gyakorlati előnyöket kínálnak ezek a technológiák az iparban? Vessen egy pillantást a KUKA egyes innovációs projektjeire.
Mixed Reality Interface: szinte kézzelfogható adatok
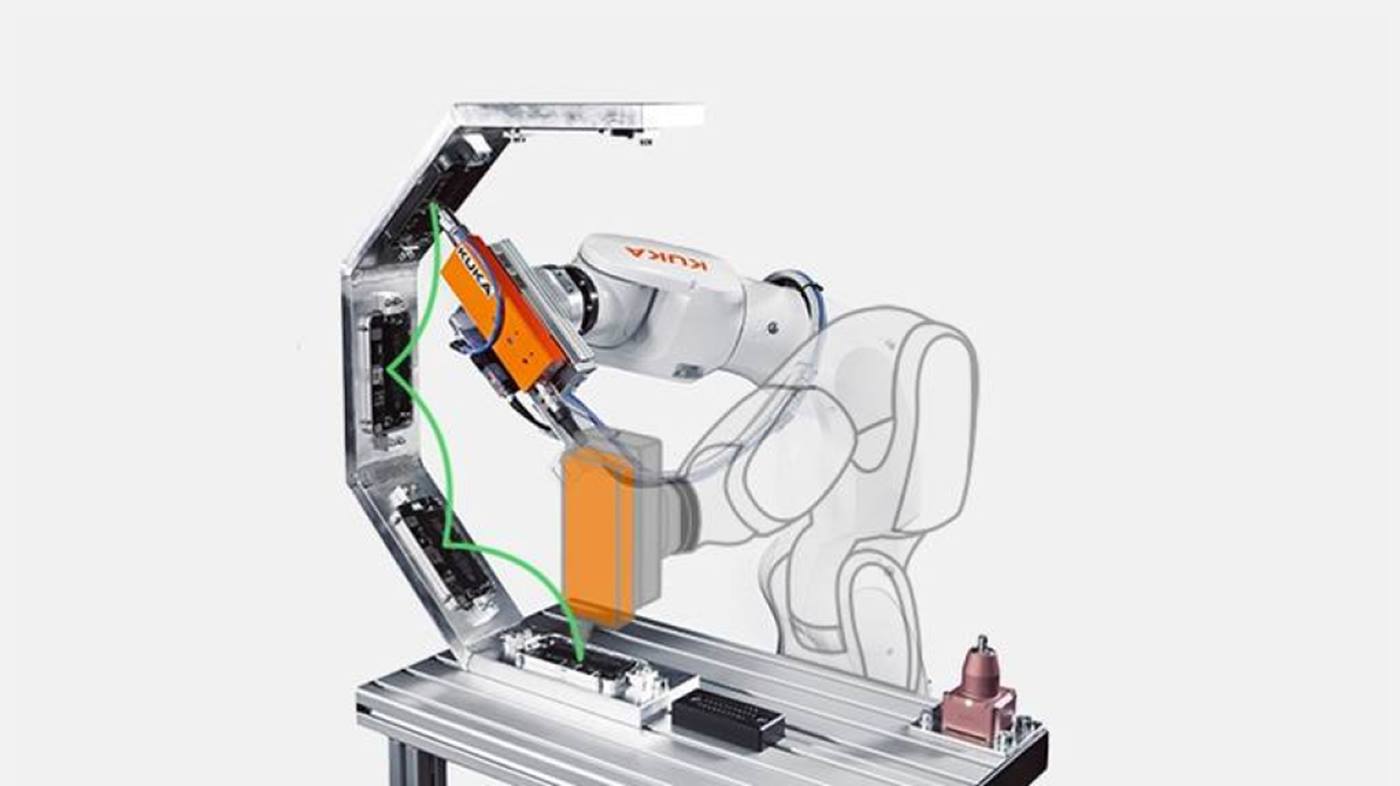
A Mixed Reality Interface pilot projektünkben az ember-robot-interakció új útjait járjuk be: A fejre szerelt kijelző (pl. Microsoft Hololens) segítségével vagy a tabletre ill. okostelefonra telepített alkalmazáson keresztül a felhasználók a robot védelmi és munkaterének valamint pályájának adatait közvetlenül a cellán tudják megtekinteni, így szó szerint „beavatkozhatnak” a megfelelő értékek programozásával. Ez lényegesen intuitívabbá és felhasználóbarátabbá teszi az üzembe helyezési feladatok elvégzését.
A Mixed Reality Interface egy felhasználó szemszögéből: A robot védelmi és munkatere egyértelműen felismerhető.
Mixed Reality Interface: szinte kézzelfogható adatok
KUKA.Sim: Intelligens szimulációs szoftver KUKA robotokhoz
KUKA.Sim szimulációs szoftverünkkel a robotok a gyártási környezeten kívül programozhatók. A szoftver lehetővé teszi a felhasználók számára, hogy egy digitális ikerrel, tehát a későbbi gyártási folyamat pontos virtuális leképezésével tudjon dolgozni. Legyen szó a folyamat kialakításáról, az anyagáramlások és szűk keresztmetszetek vagy a PLC-kód megjelenítéséről: A KUKA.Sim által létrehozott 3D-szimuláció az összes tervezési folyamatot lefedi. A virtuális és valós vezérlés ilyenkor azonos adatokkal működik: Amit virtuálisan megterveznek, az később pontosan úgy történik meg a valóságban is. Ez lehetővé teszi a gyártási folyamatok maximális tervezési biztonságát alacsony ráfordítás és költségek mellett.
KIVI: A mesterséges intelligencia csökkenti a karbantartási ráfordítást
Ha az egyes robotkomponensek élettartama előrejelezhető, elkerülhetők a költséges kiesések és a gyártásmegszakítások. Pontosan erről szól a Bajorország gazdasági, energia- és technológiaügyi minisztériuma (StMWi) által támogatott „Mesterséges intelligencia az ipari robotok alkalmazási biztonságának és élettartamának előrejelzéséhez” (KIVI) kutatási projekt. A cél az ipari robotok állapotának folyamatos felügyelete és az előrejelzésen alapuló karbantartás (Condition Monitoring és Predictive Maintenance) előmozdítása. Ennek első lépése, hogy több érzékelő továbbítja az egyes robotkomponensek rezgési viselkedését működés közben. A megfelelő adatok kiértékelése során a mesterséges intelligenciát alkalmazzák: ez felismeri a mintákat a kopási állapotok kialakulásánál, és ez alapján megtanulja felismerni a viselkedési modelleket. Az eredmény egy prototipikus MI-eszköztár, amely most már a kiértékelési fázisban van. Amint a kereskedelmi forgalomban is kapható lesz, a gyártó vállalatok növelni tudják majd a berendezések rendelkezésre állását és hatékonyabbá tudják majd tenni a termelési folyamatokat – ami nem utolsósorban hozzájárul az erőforrások kíméletes használatához is.
Az MI által végzett felügyelet és a megelőző karbantartás előnyei
Növeli a berendezés rendelkezésre állását.
A gyártási folyamat hatékonyabb lesz.
Kíméli az erőforrásokat.
Translearn: a robotok megtanulnak tanulni
Az ipari robotok valamennyi optimalizálási folyamatának kiindulási pontja az adat. Azonban az adatok előállítása és összegyűjtése sok időt és pénzt igényel. A takarékosság jegyében az adatokat napjainkban úgy is lehet gyűjteni, ha egyszerűen csak szimuláljuk a robot-interakciókat. A probléma: a valóságot még az igen fejlett szimulációk sem képesek tökéletesen leképezni. A szimulációs környezetben betanított cselekvési láncolatok nem alkalmazhatók csak úgy a valódi robotokon. A nehézség gyakori elnevezése a „Reality Gap” (valósághézag).
„TransLearn“ projektünknek pontosan ez a kiindulópontja: A valósághézagot (reality gap) új szeretnénk áthidalni, hogy azonosítjuk a szimuláció hibáit. A cél az, hogy a szimulációs eredményeket zökkenőmentesen lehessen alkalmazni a valódi robotokon.
Ennek számos előnye van: a szimulációban a robotok gyorsabban és jobban programozhatók, így csökkennek a programozási költségek. Ezen kívül a robotok könnyebben és önállóbban tudnak tanulni, ha mind erre mind szimulációban, mind a valós berendezésben sor kerül. Az ilyen szinten optimalizált tanulási folyamatnak köszönhetően az ipari robotokat a jövőben egyáltalán nem kell majd nagy ráfordítással programozni, elég lesz instrukciókkal ellátni őket. Így önállóan is képesek lesznek megtanulni, hogyan tudják lerövidíteni az ütemidőket vagy hogyan fogyasztanak kevesebb áramot.
OPERA: Vezérelje pontosabban a robotokat.
Az OPERA segítségével a felhasználók a cobotjaik valószínűsíthető mozgásfolyamatait látják. Az együttműködő robotok, az úgynevezett cobotok úgy tanulnak, hogy a felhasználó kézzel elvégzi velük a kívánt mozgásfolyamatokat. Ezért kézi irányítású programozásról is beszélünk. Ez elsősorban a közepes vállalkozások életét könnyíti meg. Az intuitív kezelés ellenére azonban az eljárásban még mindig bizonyos ravaszságra van szükség a pontosság és a hibatűrések területén, így a programozás során még mindig jelen kell lennie egy szakértőnek.
Pontosan ez az OPERA projekt kiindulópontja: Mivel a cobotok esetében nem határozható meg az összes hibaforrás determinisztikus módon, valószínűségen alapuló modelleket fejlesztettünk ki. A felhasználók egy 3D-modellben egyszerűen láthatják, hol jelentkeznek pontatlanságok a cobot mozgásfolyamatai során, és így megfelelő módon tudnak rá reagálni. Így élvezhetik a nagyobb rugalmasság és pontosság, valamint a nagyobb meghibásodási biztonság előnyeit.
Az OPERA segítségével a felhasználók a cobotjaik valószínűsíthető mozgásfolyamatait látják.
VWS4LS: Egy digitális iker mozdítja elő az automatizálást
A vezetékkészlet („kábelköteg” vagy „karosszériavezérlő”) a gépjárművek egyik legnagyobb ráfordítást igénylő, legösszetettebb alkatrésze. Hiszen egy új gyártási sorozathoz annyi egyedi vezetékkészlet létezik, ahány felszereltségi változat: több százezer. Az egyedi gyártású vezetékkészletek gyártása ennek megfelelően igen költséges. Ezért partnereinkkel együttműködve egy „Vezetékkészlet-kezelő héj” (VWS4LS) megvalósításán dolgozunk. A „kezelőhéj” technológia alapjain ebben a projektben az egyes vezetékkészletekhez tartozó információkat úgy egészítjük ki, hogy egy együttműködő digitális iker hozható létre a gépjárműben található vezetékkészlet fejlesztéséhez, gyártásához és beszereléséhez.
A KUKA ennek során a termék- és folyamatleírások létrehozására és az adott gyártáshoz szükséges robotmozgások kialakítására összpontosít az irányítóhéjak megfelelő információi alapján.
Tudjon meg többet a VW4LS projektről.
BaSys 4.2: A gyártási folyamatok rugalmasabbá válnak
A modern gyártási folyamatokat alkalmazó vállalkozásoknak gyorsan kell reagálniuk a változó keresletre vagy a megváltozott feltételekre. Különösen a gyártási folyamat esetén van szükség gyakori módosításokra - magán a folyamaton, a gyártási erőforrásokon, de a legyártandó terméken is. Egy ilyen „folyamatos mérnöki tervezésnek” ezért mindig lehetségesnek kell lennie. A BaSys 4 már olyan gyártóberendezések alaprendszerét fejlesztette ki, amely hatékonyan átalakíthatóvá teszi a gyártási folyamatokat. A Szövetségi Oktatási és Kutatási Minisztérium (BMBF) által támogatott BaSys 4.2 projekt keretében azon dolgozunk, hogy további Ipar 4.0 infrastruktúra-elemeket valósítunk meg az Ipar 4.0 platform koncepciói és szabványai alapján. A projektben elsősorban a „Köztes szoftver”, a „Kapacitások” és a „Virtualizáció” témakörökre összpontosítunk. Ennek során a szabványosított kapacitásmodelleket szeretnénk továbbfejleszteni és azok alkalmazását megvalósítani az automatizált kapacitás-ellenőrzéseknél.
A cél olyan alakítható gyártóberendezések létrehozása, amelyek intelligensen és érthetően képesek reagálni a megváltozott követelményekre.
Tudjon meg többet a KUKA és az Ipar 4.0 kapcsolatáról: