U gebruikt een oudere browser-versie van Internet Explorer. Actualiseer uw browser voor een optimale weergave
Met KUKA naar de toekomst van Industrie 4.0
Wat houdt de toekomst van Industrie 4.0 in? Een ding is zeker: de toekomst is al begonnen. Kunstmatige intelligentie doet zijn intrede in de productie. Machines beginnen zelfstandig te leren en zelf de productie efficiënter te maken. En de fysieke en digitale wereld lopen steeds meer in elkaar over.
Industrie 4.0: Een blik op de toekomst
Het begrip Industrie 4.0 bestaat al meerdere jaren. En ook de bijbehorende technologieën – bijvoorbeeld het Internet of Things, cloudcomputing of kunstmatige intelligentie (Artificial Intelligence, AI) – werden niet gisteren uitgevonden. Toch wordt er bijna dagelijks aanzienlijke technische vooruitgang geboekt. Daarbij onderscheiden zich drie trends.
Kunstmatige intelligentie (KI) is momenteel een van de drijvende krachten achter de digitale transformatie – en zal dat in de toekomst nog meer worden. Dankzij KI zullen machines bijvoorbeeld in staat zijn om vooruitziend te wachten. En in de Smart Factory toegepaste robots veranderen in autonome assistenten die zelfstandig leren, logisch handelen en met elkaar kunnen communiceren.
Ook machine learning (machine-leren) baant zich als een van de voor KUKA belangrijkste gebieden van KI een weg naar de fabriek en zal weldra uitgroeien tot een vast onderdeel van de Smart Factory. Lerende machines kunnen de door hen zelf gegenereerde patronen en oorzaak-gevolg-verbanden "verstaan". Ze "leren" en reageren hierop in real-time door zelfstandig hun algoritmen te verfijnen.
Niet minder revolutionair is het principe van Mixed Reality. Dit combineert de technieken van Virtual Reality (VR) en Augmented Reality (AR). Virtual Reality betekent dat de gebruiker volledig is afgesneden van de reële wereld en zich in een virtuele omgeving bevindt die via een bril zichtbaar is. Bij Augmented Reality blijft de reële omgeving zichtbaar, maar er wordt digitale inhoud (virtuele objecten, informatie) bovenop de reële omgeving geplaatst. En met de technologie van Mixed Reality kan virtuele inhoud met de reële wereld worden verbonden. In tegenstelling tot Augmented Reality wordt bij Mixed Reality inhoud niet eenvoudig geprojecteerd, maar verschijnt via mobiele eindapparaten of head-mounted displays, zoals de Microsoft Hololens, als hologram dat werkelijkheidsgewijs in de fysieke wereld is geïntegreerd. Dit kan worden verplaatst en veranderd alsof het een reëel voorwerp is.
De toekomst is dus al begonnen. Maar welke praktische voordelen hebben deze technologieën in de industrie te bieden? Bekijk een aantal innovatieprojecten van KUKA.
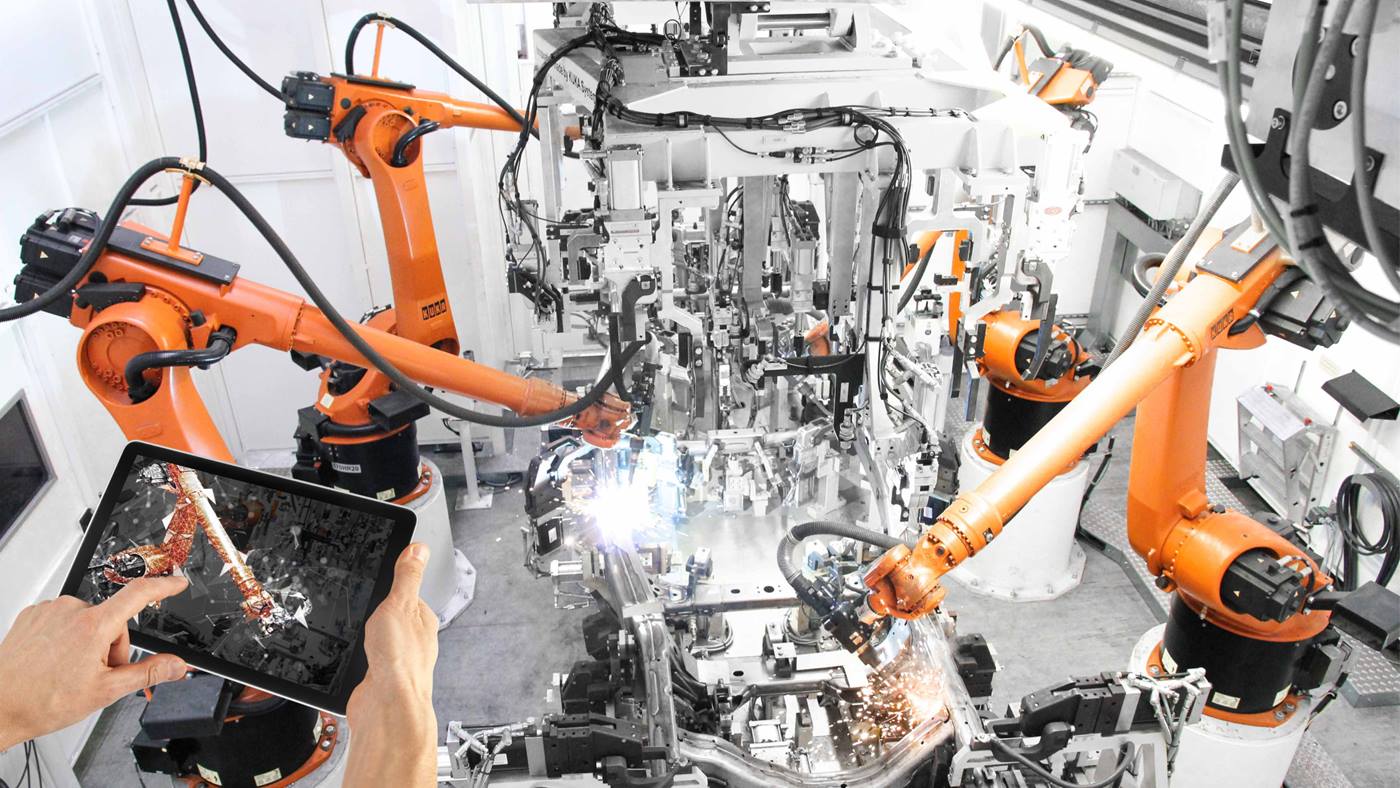
Mixed Reality Interface: Gegevens binnen grijpbereik
In ons Mixed Reality Interface-pilootproject betreden we nieuwe paden in de interactie tussen mens en robot: Door middel van een head-mounted display (bijv. Microsoft Hololens) of via een app op een tablet of smartphone kunnen gebruikers gegevens over de veiligheids- en werkruimte van de robot alsook de robotbaan direct aan de cel bekijken en zo in de waarste zin van het woord "ingrijpen" om overeenkomstige instructies te programmeren. Dat maakt het uitvoeren van inbedrijfnametaken veel intuïtiever en gebruiksvriendelijker.
Mixed Reality Interface vanuit het oogpunt van een gebruiker: de veiligheids- en werkruimte van de robot is duidelijk herkenbaar.
Mixed Reality Interface: Gegevens binnen grijpbereik
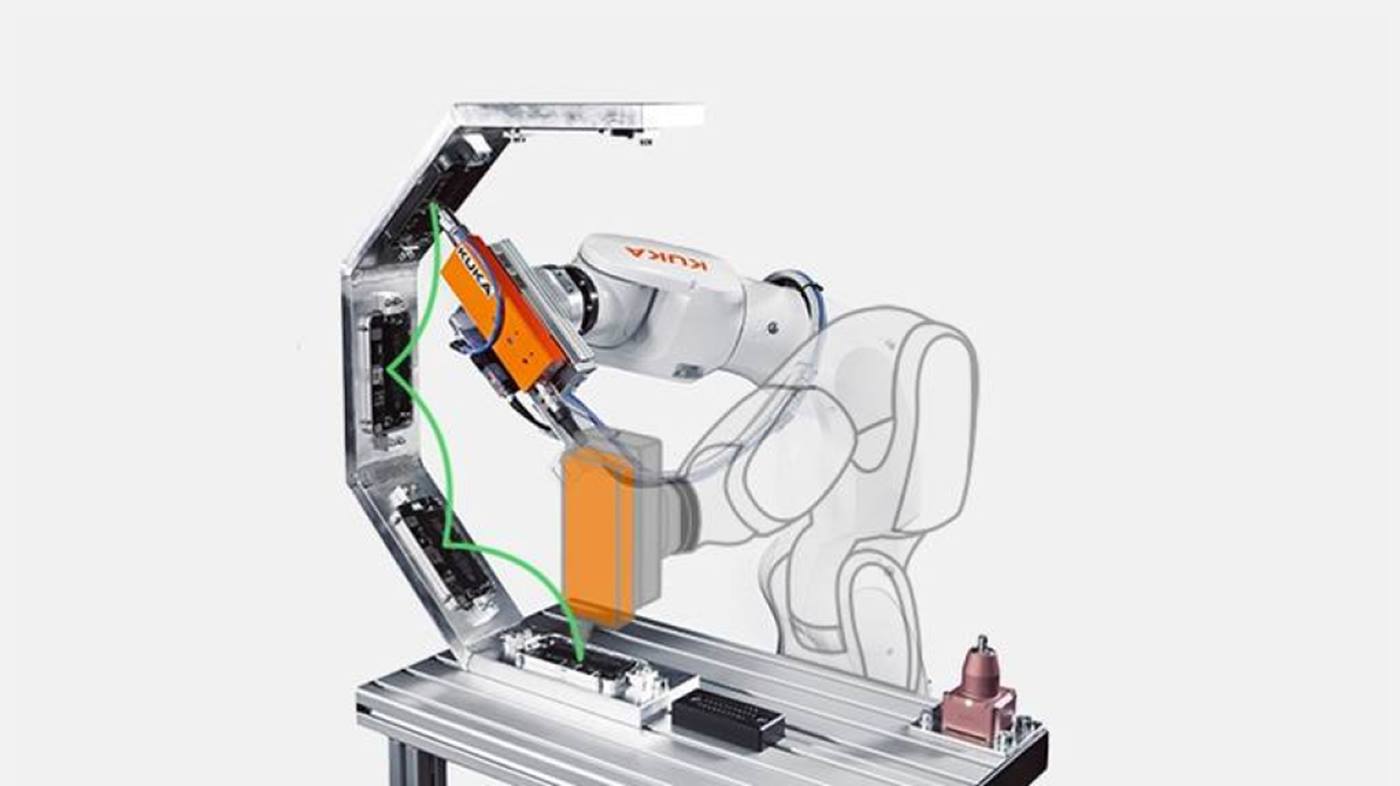
KUKA.Sim: Slimme simulatiesoftware voor KUKA robots
Met onze simulatiesoftware KUKA.Sim kunnen robots buiten de productieomgeving worden geprogrammeerd. Met de software kunnen gebruikers interageren met een digitale tweeling, dus een exacte virtuele weergave van het latere productieproces. Design van het proces of de visualisatie van materiaalstromen en knelpunten of de PLC-code: de door Kuka.Sim aangemaakte 3D-simulatie dekt alle planningsprocessen. De virtuele en reële besturing werken daarbij met identieke gegevens: wat virtueel wordt gepland, gebeurt later ook precies zo in de werkelijkheid. Dit maakt de hoogste planningszekerheid van de productieprocessen met minimale inspanning en kosten mogelijk.
KIVI: Kunstmatige intelligentie vermindert het onderhoud
Als men de levensduur van afzonderlijke robotcomponenten kan voorspellen, kunnen dure uitvallen en productieonderbrekingen worden vermeden. Dat is precies de bedoeling van het door het Beierse Ministerie van Economie, Energie en Technologie (StMWi) ondersteunde onderzoeksproject "Kunstmatige intelligentie voor de voorspelling van de gebruiksveiligheid en de levensduur van industriële robots" (KIVI). Het doel is om de toestand van industriële robots continu te bewaken en vooruitziend onderhoud mogelijk te maken (condition monitoring en predictive maintenance). Hiervoor geven eerst meerdere sensoren het bedrijfszwenkgedrag van afzonderlijke robotcomponenten door. Bij de analyse van de gegevens wordt dan gebruik gemaakt van kunstmatige intelligentie: deze herkent patronen bij het ontstaan van slijtagetoestanden en leert daaruit gedragsmodellen. Het resultaat is een prototype van een KI-toolbox, die zich nu al in de evaluatiefase bevindt. Zodra deze in de handel kan worden gebracht, zullen producerende ondernemingen in staat zijn om de beschikbaarheid van hun installaties te verhogen en het productieproces efficiënter te maken – wat zeker ook bijdraagt aan het spaarzaam gebruik van hulpbronnen.
Voordelen van bewaking en preventief onderhoud door KI
Verhoogt de beschikbaarheid van de installatie.
Maakt het productieproces efficiënter.
Spaart grondstoffen.
Translearn: Robots leren leren
Het uitgangspunt van alle optimalisatieprocessen van industriële robots zijn gegevens. Het genereren en verzamelen van deze gegevens kost echter veel tijd en geld. Om te besparen, kunnen gegevens tegenwoordig ook worden verzameld door robotinteracties eenvoudig te simuleren. Het probleem: zelfs ver geavanceerde simulaties kunnen de realiteit nog niet perfect nabootsen. De hier geleerde handelingslijnen kunnen niet zonder meer naar reële robots worden overgedragen. Dit probleem wordt vaak aangeduid als "Reality Gap ".
En precies hier speelt ons project "TransLearn" zijn troeven uit: we willen de reality gap overwinnen door de fouten van de simulatie te identificeren. Het doel is om de simulatieve resultaten naadloos over te dragen naar reële robots.
Dit biedt heel wat voordelen: in de simulatie kunnen robots sneller en beter worden geprogrammeerd, waardoor de programmeerkosten dalen. Bovendien kunnen robots beter en zelfstandig leren als dit zowel in de simulatie als in de reële installatie gebeurt. Dankzij een dergelijk geoptimaliseerd leerproces moeten industriële robots in de toekomst helemaal niet meer omslachtig worden geprogrammeerd, maar alleen nog worden geïnstrueerd. Zo leren ze ook zelfstandig hoe ze hun cyclustijden kunnen verkorten of minder stroom kunnen verbruiken.
OPERA: Robots nauwkeuriger besturen.
Met OPERA zien gebruikers de waarschijnlijke bewegingsprocessen van hun cobots. Collaboratieve robots, zogenaamde CoBots, leren doordat de gebruiker samen met hen met de hand de gewenste bewegingsprocessen uitvoert. Dit wordt dan ook handgeleide programmering genoemd. Dit maakt het vooral voor middelgrote ondernemingen veel eenvoudiger. Ondanks de intuïtieve hantering gaat de procedure nog steeds gepaard met finesses met betrekking tot nauwkeurigheid en fouttoleranties, zodat bij de programmering nog steeds de hulp van een expert nodig is.
En precies hier speelt ons project OPERA zijn troeven uit: Omdat bij cobots niet alle foutbronnen deterministisch bepaalbaar zijn, hebben we probabilistische modellen ontwikkeld. De gebruikers kunnen nu heel eenvoudig in een 3D-model zien waar er in de bewegingsprocessen van hun cobot onnauwkeurigheden optreden en daarop reageren. Zo profiteren ze van meer flexibiliteit en nauwkeurigheid en een grotere bescherming tegen uitval.
Met OPERA zien gebruikers de waarschijnlijke bewegingsprocessen van hun cobots.
VWS4LS: Een digitale tweeling bevordert de automatisering
De kabelset (ook wel "kabelboom" of "boordnet" genoemd) is een van de meest omslachtige en meest complexe componenten van een auto. Want voor een nieuwe serie zijn er even veel individuele kabelsets als er uitrustingsvarianten zijn: honderdduizenden. Als dusdanige individuele productie zijn kabelsets dienovereenkomstig duur bij de productie. Samen met andere partners werken we daarom aan de implementatie van een "beheerschaal voor de kabelset" (VWS4LS). Op basis van de technologie "beheerschaal" wordt in dit project digitale informatie over elke kabelset dusdanig vervolledigd dat een interoperabele digitale tweeling kan worden gemaakt voor de ontwikkeling, productie en montage van de kabelset in de auto-industrie.
KUKA concentreert zich daarbij op het opstellen van product- en procesbeschrijvingen en het afleiden van de voor de desbetreffende productie vereiste robotbewegingen uit de desbetreffende informatie van de beheerschalen.
Kom meer te weten over het project VW4LS.
BaSys 4.2: Productieprocessen worden flexibeler
Ondernemingen met moderne productieprocessen moeten snel kunnen reageren op een veranderende vraag of veranderende omstandigheden. Met name het productieproces heeft daarom vaak aanpassingen nodig – aan het proces zelf, aan de productiemiddelen, maar ook aan het te produceren product Een dergelijke "continue engineering" moet daarom te allen tijde mogelijk zijn. Met BaSys 4 werd al een basissysteem voor productie-installaties ontwikkeld, waarmee productieprocessen efficiënt kunnen worden aangepast. Met het door het Duitse Ministerie van Onderwijs en Onderzoek (BMBF) ondersteunde project BaSys 4.2 werken we nu aan de toepassing van bijkomende Industrie 4.0-infrastructuurelementen op basis van de concepten en standaards van het platform Industrie 4.0. Wij concentreren ons daarbij op de drie aspecten "Middleware", "Capaciteiten" en "Virtualisatie". Zo willen we gestandaardiseerde capaciteitsmodellen verder ontwikkelen en het gebruik ervan in geautomatiseerde capaciteitscontroles realiseren.
Het doel zijn aanpasbare productie-installaties, die intelligent en begrijpelijk op veranderde eisen kunnen reageren.