You are using Internet Explorer and will not be able to use our website properly. Please change to an up-to-date browser for ideal presentation of the website.
With KUKA into the future of Industrie 4.0
What does the future of Industrie 4.0 hold? One thing is certain: it has already begun. Artificial intelligence is making its way into production. Machines are starting to learn independently and to make production more efficient by themselves. And the physical and digital worlds are merging more and more.
Industrie 4.0: A glance into the future
The term Industrie 4.0 has been around for several years. And the corresponding technologies – for example the Internet of Things, cloud computing or artificial intelligence (AI) – were not invented just yesterday. Nevertheless, significant technical advances are being made almost daily. Three trends stand out in particular.
Artificial intelligence (AI) is already one of the driving forces of digital transformation – and will become even more so in the future. AI is making the predictive maintenance of machines possible, for example. And robots deployed in the smart factory are transforming into autonomous assistants that can learn independently, act logically and communicate with each other.
Likewise, machine learning is making its way into the factory as one of the most important areas of AI for KUKA and will soon become an integral part of the smart factory. Learning machines can “understand” the patterns and cause-and-effect relationships that they generate themselves. They “learn” and react in real time by independently refining their algorithms.
No less revolutionary is the principle of mixed reality. It combines the technologies of virtual reality (VR) and augmented reality (AR). Virtual reality means that the user is completely cut off from the real world and is in a virtual environment that can be viewed through glasses. In augmented reality, on the other hand, the real environment remains visible but is overlaid with digital content (virtual objects, information). The technology of mixed reality now allows virtual content to be combined with the real world. In contrast to augmented reality, content in mixed reality is not simply projected, but appears as a hologram realistically integrated into the physical world by means of mobile devices or head-mounted displays, such as the Microsoft HoloLens. This hologram can be moved and modified as if it were a real object.
The future has thus already begun. But what practical use do these technologies have in industry? Take a look at some of KUKA’s innovation projects.
Mixed Reality Interface: data within easy reach
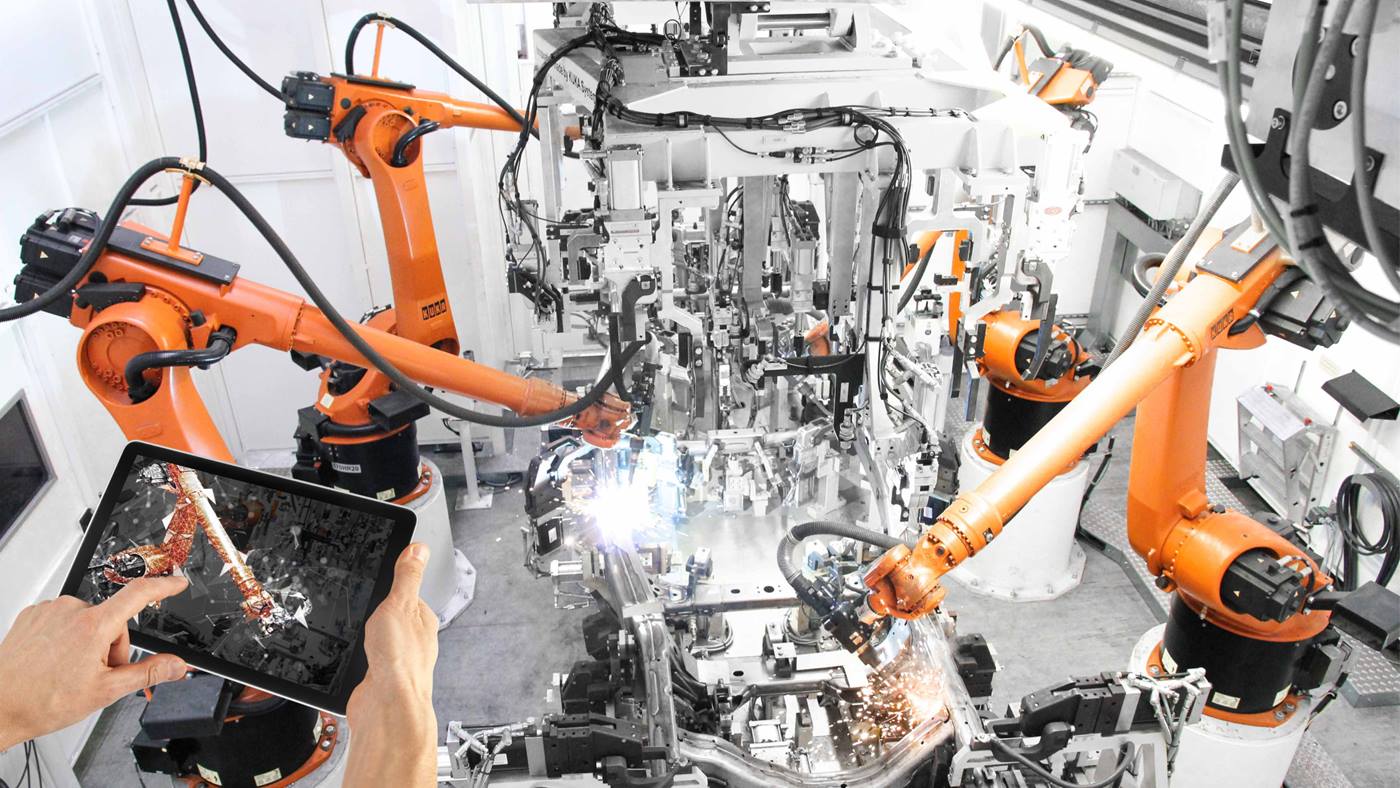
In our Mixed Reality Interface pilot project we are breaking new ground in human-robot interaction: using a head-mounted display (e.g. Microsoft HoloLens) or an app on a tablet or smartphone, users can see data regarding the robot’s protective space and workspace as well as the robot path directly at the cell and thus intervene to adapt the programming accordingly. This makes commissioning tasks much more intuitive and user-friendly.
Mixed Reality Interface from a user’s perspective: the robot’s protective space and workspace are clearly recognizable.
Mixed Reality Interface: data within easy reach
KUKA.Sim: smart simulation software for KUKA robots
With our simulation software KUKA.Sim, robots can be programmed outside the production environment. The software allows users to interact with a digital twin – an exact virtual replica of the later production process. Whether designing the process or visualizing material flows and bottlenecks or the PLC code: the 3D simulation created by KUKA.Sim covers all planning processes. The virtual and real controllers work with identical data: what is planned virtually will later take place exactly the same way in reality. This ensures maximum planning reliability for the production processes with low effort and costs.
If the service life of individual robot components can be predicted, cost-intensive failures and production downtime can be avoided. This is exactly what the research project “Artificial Intelligence for Lifetime and Availability Prediction of Industrial Robots” (KIVI), funded by the Bavarian State Ministry for Economic Affairs, Energy and Technology (StMWi), is addressing. The aim is to continuously monitor the condition of industrial robots and enable predictive maintenance (condition monitoring and predictive maintenance). For this purpose, several sensors first transmit data on the vibration behavior of individual robot components in operation. Artificial intelligence is then used to evaluate the data: it identifies patterns in the emergence of wear conditions, from which it develops behavioral models. The result is a prototype AI toolbox that is now already in the evaluation phase. As soon as it can be deployed commercially, manufacturing companies will be able to increase the availability of their systems and make the production process more efficient – which, not least, will also help to conserve resources.
Advantages of monitoring and preventive maintenance through AI
Increases system availability.
Makes the production process more efficient.
Conserves resources.
Translearn: robots learn how to learn
The starting point of all optimization processes for industrial robots is data. Producing and collecting data, however, costs a lot of time and money. For reasons of economy, data can also be collected nowadays by simply simulating robot interactions. The problem: even highly advanced simulations cannot yet replicate reality perfectly. The strands of action learned in them cannot be easily transferred to real robots. This difficulty is often referred to as the “reality gap”.
This is exactly where our “TransLearn” project comes in: We want to overcome the reality gap by identifying errors in the simulation. The goal is to seamlessly transfer the simulation results to real robots.
This brings many advantages: in simulation, robots can be programmed faster and better, which reduces programming costs. In addition, robots can learn better and more independently if this happens both in simulation and in the real system. Thanks to such an optimized learning process, industrial robots will no longer need to be programmed at all in the future, but only instructed. In this way, they can also learn independently how to shorten their cycle times or consume less power.
OPERA: controlling robots more precisely.
With OPERA, users can see the probable motion sequences of their cobots. Collaborative robots, so-called cobots, learn by the user manually guiding them through the desired motion sequences. This is therefore also referred to as hand-guided programming. It makes a lot of things easier, especially for small and medium-sized companies. Despite the intuitive handling, however, the process still requires some finesse in terms of exactness and error tolerances, which means that an expert still has to be involved in the programming.
This is exactly where the OPERA project comes in: since not all sources of error in cobots can be identified deterministically, we have developed probabilistic models. Users can now very easily see in a 3D model where inaccuracies occur in the motion sequences of their cobot and react accordingly. They thus benefit from more flexibility and accuracy and greater system stability.
With OPERA, users can see the probable motion sequences of their cobots.
VWS4LS: a digital twin advances automation
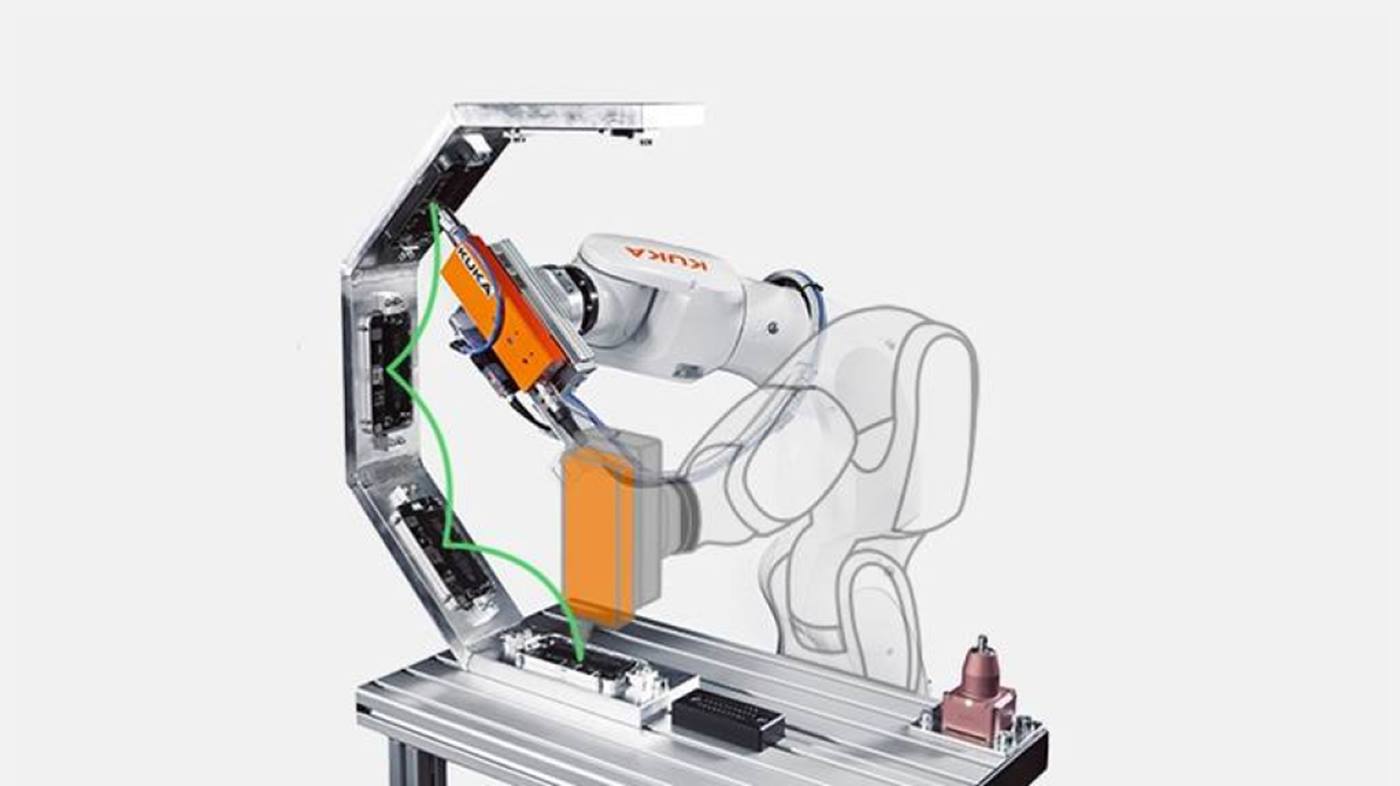
The wiring harness (also “wiring assembly” or “on-board electrical system”) is one of the most elaborate and complex individual components of an automobile. This is because there are as many individual wiring harnesses for a new series as there are equipment variants: hundreds of thousands. As such one-off products, wiring harnesses are correspondingly expensive to manufacture. Together with other partners, we are therefore working on the implementation of an “Asset Administration Shell for the Wiring Harness” (VWS4LS). Based on the “Asset Administration Shell” technology, digital information on each wiring harness is supplemented in this project in such a way that an interoperable digital twin can be created for the development, production and assembly of the wiring harness in the automobile.
KUKA is focusing on the creation of product and process descriptions and on deriving the robot motions required for the respective production sequence from the corresponding information in the asset administration shells.
Find out more about the VWS4LS project.
BaSys 4.2: making manufacturing processes more flexible
Companies with state-of-the-art production processes must be able to react quickly to variable demand or changing conditions. The production process in particular therefore frequently requires adjustments – to the process itself, to the production resources, but also to the product to be manufactured. This kind of “continuous engineering” should therefore be possible at all times. With BaSys 4, a basic system for production systems has already been developed that makes production processes efficiently adaptable. With the BaSys 4.2 project funded by the German Federal Ministry of Education and Research (BMBF), we are now working on implementing further Industrie 4.0 infrastructure elements based on the concepts and standards of the Plattform Industrie 4.0. We are focusing on the three topics “Middleware”, “Capabilities” and “Virtualization”. By doing so, we aim to advance standardized capability models and realize their use in automated capability checks.
The goal is versatile production systems that can react intelligently and transparently to changing requirements.