Vous utilisez le navigateur Internet Explorer. Pour bénéficier d’une représentation optimale, veuillez changer votre navigateur.
Vers l’avenir de l’Industrie 4.0 avec KUKA
Que recèle l’avenir de l’Industrie 4.0 ? Une chose est sûre : il a déjà commencé. L’intelligence artificielle fait son entrée dans la production. Les machines commencent à apprendre par elles-mêmes et à rendre la production plus efficace de leur propre chef. Le monde physique et le monde numérique se mélangent de plus en plus.
Industrie 4.0 : un regard tourné vers l’avenir
Le terme Industrie 4.0 existe depuis plusieurs années déjà. Les technologies correspondantes - par exemple l’Internet des objets, le Cloud Computing ou l’intelligence artificielle (Artificial Intelligence, AI) - n’ont pas non plus été inventées hier. Pourtant, des progrès techniques importants sont réalisés presque chaque jour. Trois tendances s’affirment particulièrement.
L’intelligence artificielle (IA) est déjà l’un des moteurs de la transformation numérique - et le sera encore plus à l’avenir. Grâce à l’IA, les machines seront par exemple capables de faire de la maintenance prévisionnelle. Et les robots utilisés dans la Smart Factory se transforment en assistants autonomes, capables d’apprendre, d’agir logiquement et de communiquer entre eux.
De même, le Machine Learning (apprentissage de la machine), l’un des domaines de l’IA les plus importants pour KUKA, se fraie un chemin dans l’usine et deviendra bientôt une partie intégrante de la Smart Factory. Les machines apprenantes peuvent « comprendre » les modèles et les relations de cause à effet qu’elles génèrent elles-mêmes. Elles « apprennent » et réagissent en temps réel, en affinant leurs algorithmes de manière autonome.
Le principe de Mixed Reality (réalité mixte) n’est pas moins révolutionnaire. Il combine les techniques de la réalité virtuelle (VR) et de la réalité augmentée (AR). La réalité virtuelle signifie que l’utilisateur est totalement coupé du monde réel et se trouve dans un environnement virtuel visible à travers des lunettes. En revanche, dans le cas de la réalité augmentée, l’environnement réel reste visible, mais il est recouvert de contenus numériques (objets virtuels, informations). Grâce à la technologie de la réalité mixte, il est désormais possible de combiner des contenus virtuels avec le monde réel. Contrairement à la réalité augmentée, les contenus de la réalité mixte ne sont pas simplement projetés, mais apparaissent sous forme d’hologrammes intégrés dans le monde physique de manière réaliste au moyen d’appareils terminaux mobiles ou de visiocasques, comme par exemple le Microsoft Hololens. Celui-ci peut être déplacé et modifié comme s’il s’agissait d’un objet réel.
L’avenir a donc déjà commencé. Mais quelle est l’utilité pratique de ces technologies dans l’industrie ? Jetez un coup d’œil à quelques-uns des projets d’innovation de KUKA.
Interface de réalité mixte : à portée de main
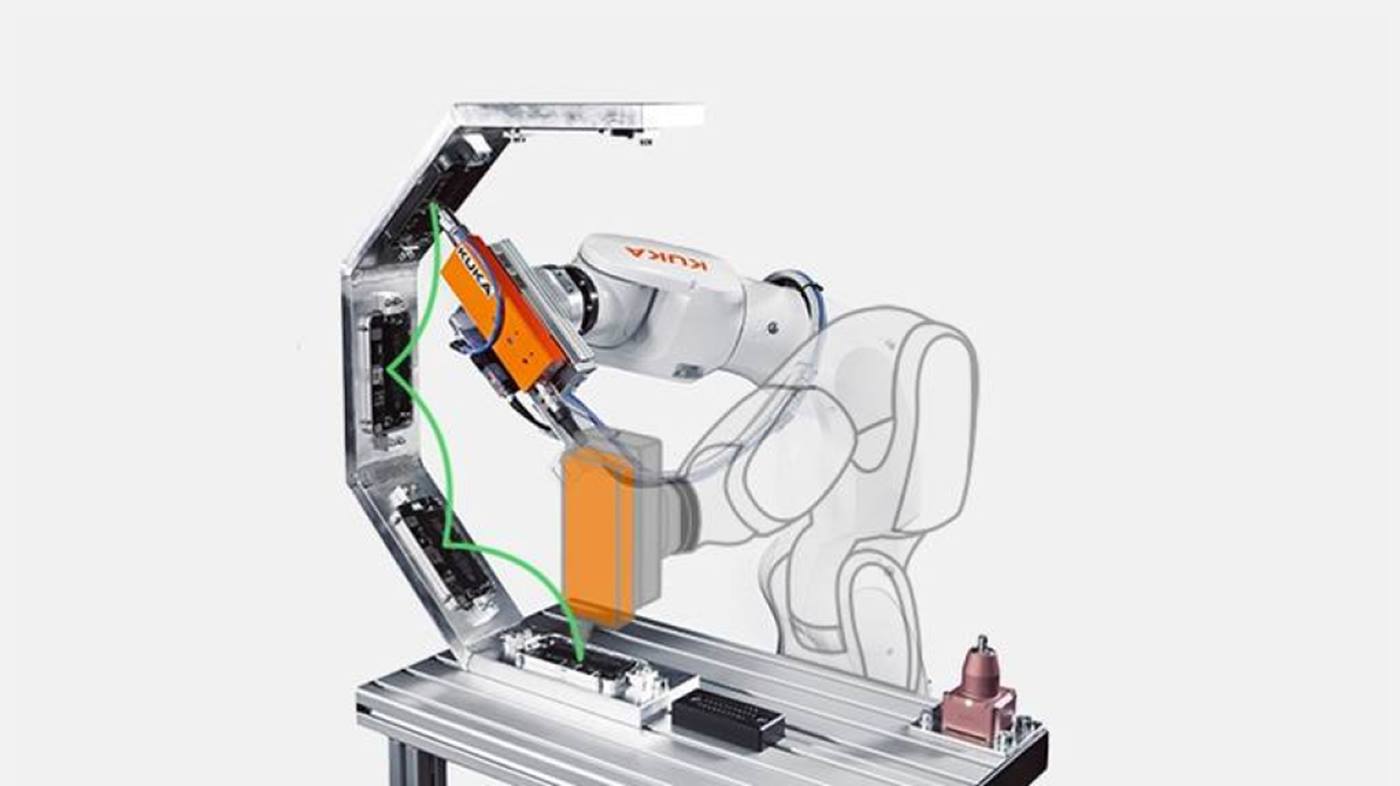
Dans notre projet pilote d’interface de réalité mixte, nous explorons de nouvelles voies dans l’interaction homme-robot : au moyen d’un visiocasque (Microsoft Hololens, p. ex.) ou d’une application sur tablette ou smartphone, les utilisateurs peuvent voir les données relatives à la zone de protection et l’enveloppe d’évolution du robot ainsi que la trajectoire du robot directement sur la cellule et ainsi « intervenir », au sens propre du terme, pour programmer les consignes correspondantes. Cela rend l’exécution des tâches de mise en service beaucoup plus intuitive et conviviale.
L’interface de réalité mixte du point de vue d’un utilisateur : La zone de protection et l’enveloppe d’évolution du robot sont clairement identifiables.
Interface de réalité mixte : à portée de main
KUKA.Sim : Logiciel de simulation intelligent pour les robots KUKA
Notre logiciel de simulation KUKA.Sim permet de programmer des robots en dehors de l’environnement de production. Le logiciel permet aux utilisateurs d’interagir avec un jumeau numérique, c’est-à-dire une réplique virtuelle exacte du futur processus de production. Qu’il s’agisse de la conception du processus ou de la visualisation des flux de matériaux et des goulots d’étranglement ou du code de l’API : la simulation 3D créée par Kuka.Sim couvre l’ensemble des processus de planification. La commande virtuelle et la commande réelle travaillent alors avec des données identiques : ce qui est planifié virtuellement se produit ensuite exactement de la même manière dans la réalité. Cela permet une sécurité de planification maximale des processus de fabrication avec un effort et des coûts réduits.
KUKA.Sim 4.0 : Logiciel de simulation intelligent pour la programmation des robots KUKA
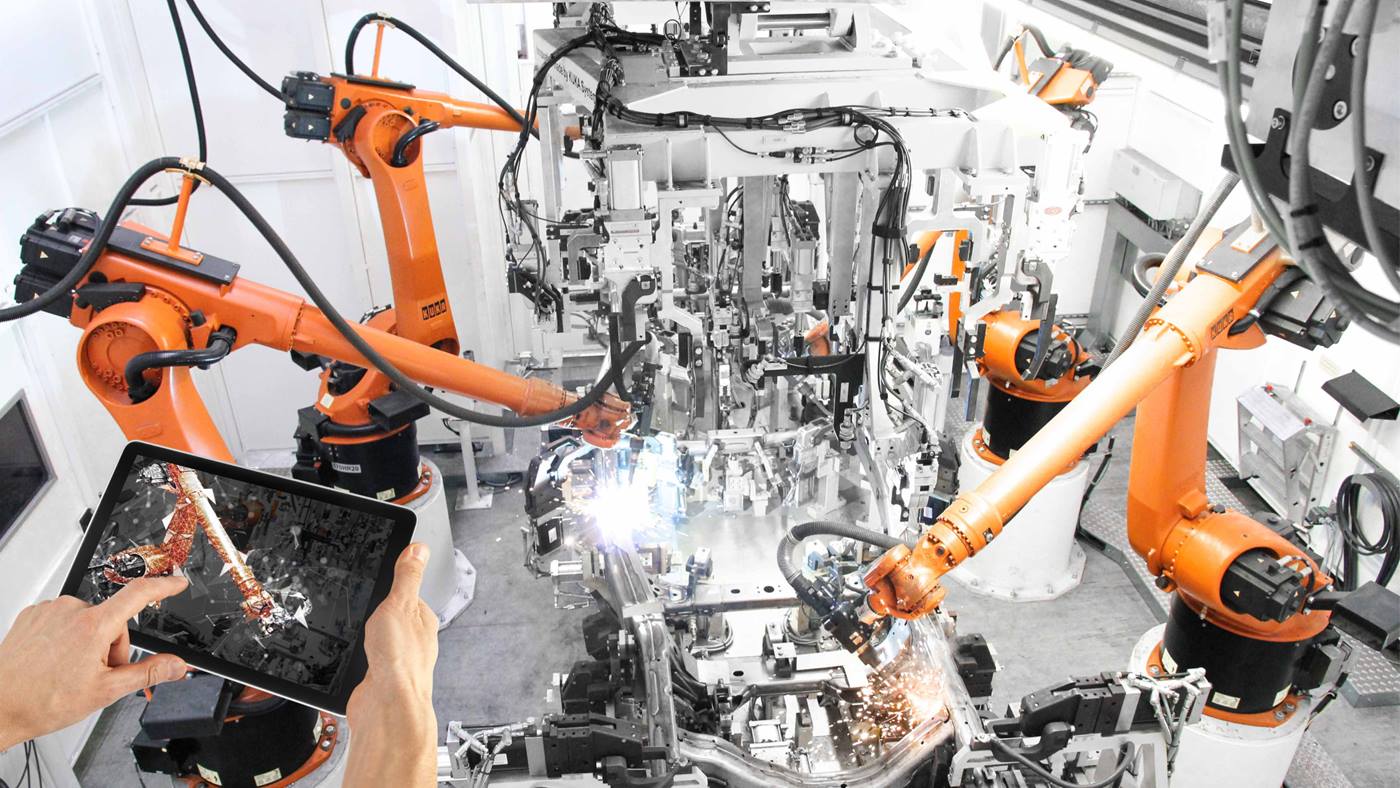
KIVI : l’intelligence artificielle réduit les frais de maintenance
Si l’on peut prédire la durée de vie des différents composants d’un robot, il est possible d’éviter des pannes et des interruptions de production coûteuses. C’est précisément l’objet du projet de recherche « Intelligence artificielle pour la prédiction de la sécurité d’utilisation et de la durée de vie des robots industriels » (KIVI), patronné par le Ministère bavarois de l’Économie, de l’Énergie et de la Technologie (StMWi). L’objectif est de surveiller en permanence l’état des robots industriels et de permettre une maintenance prévisionnelle (Condition Monitoring et Predictive Maintenance). Pour ce faire, plusieurs capteurs transmettent tout d’abord le comportement d’oscillation en service des différents composants du robot. L’évaluation des données correspondantes fait ensuite appel à l’intelligence artificielle : elle reconnaît des modèles lors de l’apparition d’états d’usure et en tire des modèles de comportement. Le résultat est un prototype de boîte à outils d’IA qui est d’ores et déjà en phase d’évaluation. Dès qu’elle pourra être utilisée commercialement, les entreprises de production seront en mesure d’augmenter la disponibilité de leurs installations et d’améliorer l’efficacité de leur processus de production, ce qui contribuera notamment à préserver les ressources.
Avantages de la surveillance et de la maintenance préventive par l’IA
Augmente la disponibilité de l’installation.
Rend le processus de production plus efficace.
Préserve les ressources.
Translearn : les robots apprennent à apprendre
Les données constituent le point de départ de tous les processus d’optimisation des robots industriels. Les créer et les collecter demande toutefois beaucoup de temps et d’argent. Pour faire des économies, il est aujourd’hui possible de collecter des données en simulant simplement des interactions robotiques. Le problème : même les simulations les plus avancées ne peuvent pas encore reproduire parfaitement la réalité. Les déroulements d’évènements appris ne peuvent pas être transférés d’office à des robots réels. Cette difficulté est souvent appelée « Reality Gap ».
C’est précisément là que notre projet « TransLearn » intervient : nous voulons combler le Reality Gap en identifiant les erreurs de la simulation. L’objectif est de transférer les résultats de la simulation directement aux robots réels.
Cela présente de nombreux avantages : dans la simulation, les robots peuvent être programmés plus rapidement et mieux, ce qui réduit les coûts de programmation. En outre, les robots peuvent apprendre mieux et de manière plus autonome si cela se fait à la fois dans la simulation et dans l’installation réelle. Grâce à un processus d’apprentissage optimisé de cette manière, les robots industriels ne devront plus du tout être programmés de manière complexe, mais seulement instruits. Ainsi, ils apprennent également de manière autonome comment réduire leurs durées de cycle ou consommer moins d’électricité.
OPERA : piloter les robots avec plus de précision.
Avec OPERA, les utilisateurs visualisent les séquences de mouvements probables de leurs Cobots. Les robots collaboratifs, appelés CoBots, apprennent lorsque l’utilisateur exécute manuellement avec eux les séquences de mouvements souhaitées. On parle donc aussi de programmation manuelle. Elle simplifie beaucoup de choses, surtout pour les entreprises de taille moyenne. Malgré son maniement intuitif, le procédé comporte toutefois encore quelques astuces en termes d’exactitude et de tolérances d’erreur, de sorte qu’il faut toujours faire appel à un expert lors de la programmation.
C’est précisément là qu’intervient le projet OPERA : comme toutes les sources d’erreur des Cobots ne peuvent pas être déterminées de manière déterministe, nous avons développé des modèles probabilistes. Les utilisateurs peuvent désormais facilement visualiser, dans un modèle 3D, où des imprécisions apparaissent dans les séquences de mouvements de leur Cobot et réagir en conséquence. Ils bénéficient ainsi d’une plus grande flexibilité et précision et d’une plus grande protection contre les défaillances.
Avec OPERA, les utilisateurs visualisent les séquences de mouvements probables de leurs Cobots.
VWS4LS : Un jumeau numérique fait avancer l’automatisation
Le jeu de câbles (également appelé « faisceau de câbles » ou « réseau de bord ») est l’un des composants individuels les plus coûteux et les plus complexes d’une automobile. En effet, pour une nouvelle série, il y a autant de jeux de câbles individuels qu’il y a de variantes d’équipement : des centaines de milliers. Les jeux de câbles étant de fabrication individuelle, ils sont par conséquent chers à produire. En collaboration avec d’autres partenaires, nous travaillons donc à la mise en œuvre d’un « Asset Administration Shell pour le jeu de câbles » (VWS4LS). Basé sur la technologie « Asset Administration Shell », ce projet complète les informations numériques de chaque jeu de câbles de manière à créer un jumeau numérique interopérable pour le développement, la production et l’assemblage du jeu de câble dans l’automobile.
KUKA se concentre ici sur la création de descriptions de produits et de processus et sur la déduction des mouvements de robot nécessaires pour chaque production à partir des informations correspondantes des Asset Administration Shell.
En savoir plus sur le projet VW4LS.
BaSys 4.2 : les processus de fabrication deviennent plus flexibles
Les entreprises dotées de processus de production modernes doivent pouvoir réagir rapidement à l’évolution de la demande ou aux changements de conditions. Le processus de production, en particulier, nécessite donc souvent des adaptations - au processus lui-même, aux ressources de production, mais aussi au produit à fabriquer. Une telle « ingénierie continue » doit donc être possible à tout moment. Avec BaSys 4, un système de base a déjà été développé pour les installations de production, qui rend les processus de production transformables de façon efficace. Avec le projet BaSys 4.2, patronné par le Ministère Fédéral allemand de la Formation et de la Recherche (BMBF), nous travaillons désormais à la mise en œuvre d’autres éléments d’infrastructure d’Industrie 4.0 sur la base des concepts et des normes de la « Plattform Industrie 4.0 ». Nous nous concentrons sur les trois thèmes suivants : « Middleware », « Capacités » et « Virtualisation ». Ainsi, nous voulons continuer à développer des modèles d’aptitudes standardisés et réaliser leur utilisation dans des contrôles d’aptitudes automatisés.
L’objectif est de créer des installations de production capables de se transformer et de réagir de manière intelligente et compréhensible à l’évolution des exigences.