Du använder en äldre version av webbläsaren Internet Explorer. För en så bra upplevelse som möjligt bör du uppdatera din webbläsare.
Realisera Industrie 4.0 tillsammans med KUKA – framtiden är redan här
Hur ser framtiden ut för Industrie 4.0? En sak är säker: Den är redan här. Artificiell intelligens går sitt intåg i produktionen. Maskiner kan idag på egen hand lära sig hur de ska agera i produktionsmiljön och därigenom bidra till att effektivisera produktionen. Och den fysiska och digitala världen blandas allt mer.
Industrie 4.0: En blick in i framtiden
Begreppet Industrie 4.0 har funnits i flera år. Detsamma gäller dess tekniker, t.ex. sakernas internet, molntjänster och artificiell intelligens (AI), som redan funnits ett tag. Trots detta faktum så görs det nu betydande tekniska framsteg nästan dagligen. Tre trender utmärker sig särskilt.
Artificiell intelligens (AI) är redan idag en av drivkrafterna bakom den digitala omvandlingen – och kommer att bli ännu viktigare i framtiden. Tack vare artificiell intelligens kommer maskiner till exempel att kunna utföra förebyggande underhåll. Robotar som används i smarta fabriker håller på att förvandlas till autonoma assistenter som på egen hand lär sig sin roll i produktionen, agerar logiskt och kan kommunicera med varandra.
Maskininlärning, som är ett av de viktigaste AI-områdena för KUKA, används allt oftare och kommer snart att bli en hörnsten i våra smarta fabriker. Maskiner som på egen hand lär sig att ”förstå” de mönster och orsakssamband som de själva skapar. De ”lär sig” och reagerar på denna information i realtid genom att – helt på egen hand – förfina sina algoritmer.
Principen för blandad verklighet är lika revolutionerande. I denna kombineras teknikerna för virtuell verklighet (VR) och förstärkt verklighet (AR). Virtuell verklighet innebär att användaren är helt avskärmad från den verkliga världen och befinner sig i en virtuell miljö som kan betraktas genom ett par glasögon. I förstärkt verklighet däremot är den verkliga miljön fortfarande synlig men kompletteras med digitalt innehåll (virtuella objekt, information). I tekniken blandad verklighet kombineras virtuellt innehåll med den verkliga världen. I motsats till förstärkt verklighet projiceras inte bara innehållet i blandad verklighet utan visas som ett hologram som integreras på ett realistiskt sätt i den fysiska världen. Resultatet kan visas på mobila enheter eller i huvudmonterade skärmar, t.ex. Microsoft Hololens. Innehållet kan flyttas och ändras som vore det ett verkligt objekt.
Framtiden är alltså redan här. Men vilken praktisk nytta har dessa tekniker i industrin? Låt oss ta en titt på några av KUKA:s innovationsprojekt.
Gränssnitt för blandad verklighet: Snabbåtkomliga data
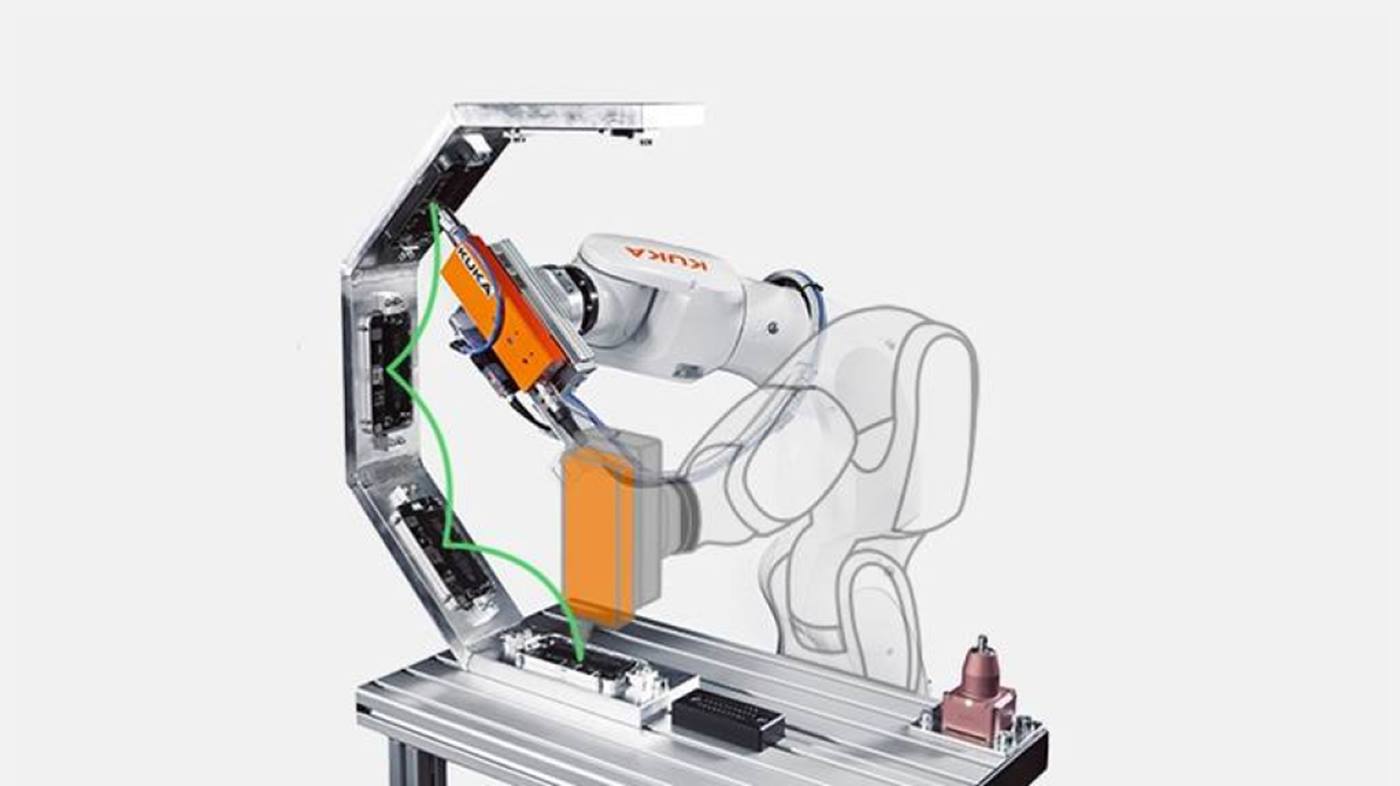
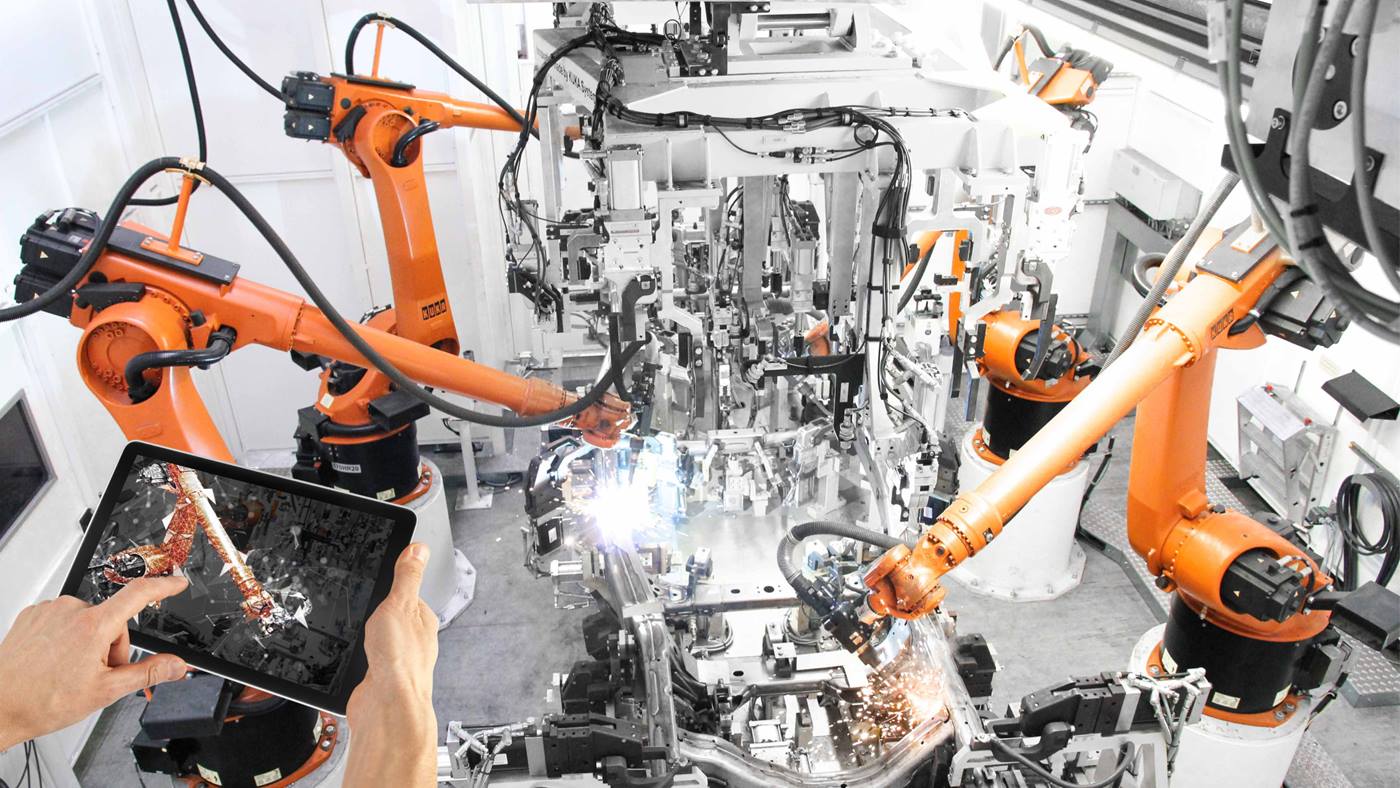
I vårt pilotprojekt Mixed Reality Interface bryter vi ny mark inom människa-robot-interaktion: Med hjälp av en huvudmonterad skärm (t.ex. Microsoft Hololens) eller en app på en surfplatta eller smartmobil kan användaren se data om robotens skydds- och arbetsutrymme liksom om robotens rörelsebana direkt vid cellen och därmed bokstavligen ”ingripa” och göra ändringar i programmet. Idrifttagningen kan nu utföras på ett mer intuitivt och användarvänligt sätt.
Gränssnitt för blandad verklighet ur användarens synvinkel: Robotens skydds- och arbetsutrymme syns tydligt.
Gränssnitt för blandad verklighet: Snabbåtkomliga data
KUKA.Sim: Vår smarta simuleringsprogramvara för KUKA-robotar
Med vår simuleringsprogramvara KUKA.Sim kan robotar programmeras utanför produktionsmiljön. Programvaran gör det möjligt för användare att interagera med en digital tvilling, d.v.s. en exakt virtuell avbild av den fysiska produktionsprocessen. Vare sig det gäller processens utformning, visualisering av materialflöden, flaskhalsar eller PLC-koden: 3D-simuleringen som Kuka.Sim skapar omfattar alla planeringsprocesser. Den virtuella och fysiska styrningen använder samma data: Det som planeras virtuellt utförs på exakt samma sätt i verkligheten. Detta ger hög planeringssäkerhet vid planering av produktionsprocesser tack vare att mindre arbetsinsats krävs och kostnaderna kan sänkas.
Om det skulle gå att förutsäga livslängden på enskilda robotkomponenter, då skulle det gå att undvika kostsamma fel och produktionsavbrott. Det är precis vad forskningsprojektet ”Artificiell intelligens vid förutsägelser om driftsäkerhet och livslängd hos industrirobotar” (KIVI) handlar om. Projektet finansieras av det bayerska delstatsministeriet för ekonomi, energi och teknik (StMWi). Målet är att kontinuerligt övervaka industrirobotens status för att möjliggöra förebyggande underhåll (Condition Monitoring och Predictive Maintenance). För detta ändamål överför ett antal sensorer vibrationsdata för enskilda robotkomponenter under pågående drift. Den erhållna datainformationen utvärderas sedan med hjälp av artificiell intelligens: AI-komponenten identifierar mönster för hur slitage uppträder och lär sig beteendemodeller. Resultatet – en prototyp av en AI-verktygslåda – befinner sig redan i utvärderingsfasen. När den är redo för kommersiell användning kommer tillverkande företag att kunna öka anläggningstillgängligheten och effektivisera sina produktionsprocesser – med bättre resursutnyttjande som följd.
Fördelar med övervakning och förebyggande underhåll med hjälp av AI
Högre anläggningstillgänglighet.
Effektivare produktionsprocesser.
Bättre resursutnyttjande.
Translearn: Robotar blir ännu bättre på autonom inlärning
Alla processer som syftar till att optimera robotdriften behöver data. Att skapa och samla in data kostar dock mycket tid och pengar. För att spara pengar kan man idag samla in data genom att simulera robotinteraktioner. Problemet: Inte ens de mest avancerade simuleringarna kan återge verkligheten perfekt. De handlingsmönster som lärs in under simuleringen kan inte överföras direkt till riktiga robotar. Denna svårighet kallas ofta för ”reality gap” eller verklighetsglapp.
Det är här som vårt projekt ”TransLearn” kommer in i bilden: Vi vill överbrygga detta verklighetsglapp genom att identifiera felen i simuleringen. Målet är en sömlös överföring av simuleringsresultaten till riktiga robotar.
Detta ger många fördelar: Det går snabbare och är enklare att programmera en robot i en simuleringsmiljö, vilket minskar programmeringskostnaderna. Dessutom kan robotar lära sig bättre och mer självständigt om det sker både i simuleringen och i den fysiska anläggningen. Tack vare inlärningsprocesser som optimeras på detta sätt kommer industrirobotar inte längre behöva programmeras på ett tidskrävande sätt, utan endast instrueras. Robotarna kommer själva att lära sig hur de kan förkorta sina cykeltider och förbruka mindre ström.
OPERA: Styra robotar mer exakt.
Med OPERA kan användaren se vilka rörelsesekvenser som en cobot sannolikt kommer utföra. Samverkande robotar, så kallade cobotar, programmeras genom att användaren styr coboten med handen och på så sätt visar hur den ska utföra sina rörelsesekvenser. Därför talar man också om handstyrd programmering. Detta förenklar mycket, särskilt för små och medelstora företag. Trots denna intuitiva hantering kräver metoden alltjämt att noggrannhet och feltoleranser tas i beaktande, vilket innebär att en expert måste utföra programmeringen.
Det är här som OPERA-projektet kommer in i bilden: Eftersom inte alla felkällor i cobotar kan bestämmas deterministiskt har vi utvecklat probabilistiska modeller. Användaren kan nu enkelt se i en 3D-modell var cobotens rörelsesekvenser brister i noggrannhet och kan reagera i enlighet med iakttagelserna. Detta ger större flexibilitet, noggrannhet och tillförlitlighet.
Med OPERA kan användaren se vilka rörelsesekvenser som en cobot sannolikt kommer utföra.
VWS4LS: En digital tvilling driver på automationen
Kabelstam (även kallad ”kabelsats” eller ”kablage”) är en av de mest omfattande och komplexa komponenterna i ett fordon. När en ny fordonsserie tas fram finns det nämligen lika många individuella kabelstammar som det finns utrustningsvarianter: Hundratusentals. Och som specialtillverkade produkter är kabelstammar dyra att tillverka. Tillsammans med andra partner arbetar vi därför på att realisera ett ”hanteringsskal för kabelstammar” (VWS4LS). I projektet, som bygger på tekniken ”hanteringsskal”, kompletteras digital information om varje kabelstam på ett sådant sätt att en interoperabel digital tvilling kan skapas som sedan kan användas vid utveckling, produktion och montering av kabelstammen i bilen.
KUKA fokuserar på att skapa produkt- och processbeskrivningar samt på att härleda de robotrörelser som krävs för den aktuella produktionsuppgiften utifrån informationen i hanteringsskalen.
Här kan du läsa mer om VW4LS-projektet.
BaSys 4.2: Tillverkningsprocesser blir mer flexibla
Företag med moderna produktionsprocesser måste kunna reagera snabbt på varierande efterfrågan och nya villkor. Särskilt produktionsprocessen behöver därför ofta anpassas och då själva processen eller produktionsresurserna, men även den produkt som ska tillverkas. En dylik ”kontinuerlig engineering” måste därför vara möjlig vid varje tidpunkt. Med BaSys 4 har det redan utvecklats ett grundsystem för produktionsanläggningar som möjligör effektiv förändring av produktionsprocesser. I projektet BaSys 4.2, som finansieras av bundesministeriet för utbildning och forskning (BMBF), har vi som mål att realisera ytterligare infrastrukturelement för Industrie 4.0, baserat på Industrie 4.0-plattformens koncept och standarder. Vi fokuserar på tre teman: ”middleware”, ”funktioner” och ”virtualisering”. Vi arbetar på att vidareutveckla standardiserade förmågemodeller och realisera deras användning i automatiserade förmågekontroller.
Målet är omvandlingsbara produktionsanläggningar som kan reagera intelligent och konsekvent när förutsättningarna och kraven ändras.