Sie verwenden den veralteten Browser Internet Explorer. Für eine optimale Darstellung unserer Website wechseln Sie bitte Ihren Browser
Mit KUKA in die Zukunft der Industrie 4.0
Was birgt die Zukunft der Industrie 4.0? Eines ist gewiss: Sie hat bereits begonnen. Künstliche Intelligenz zieht in die Produktion ein. Maschinen beginnen, selbständig zu lernen und von sich aus die Produktion effizienter zu machen. Und physische und digitale Welt vermischen sich immer mehr.
Industrie 4.0: Ein Blick in die Zukunft
Den Begriff Industrie 4.0 gibt es schon seit mehreren Jahren. Und auch die entsprechenden Technologien – zum Beispiel das Internet der Dinge, Cloud Computing oder künstliche Intelligenz (Artificial Intelligence, AI) – sind nicht erst gestern erfunden worden. Dennoch werden fast täglich bedeutende technische Fortschritte erzielt. Dabei zeichnen sich drei Trends besonders ab.
Künstliche Intelligenz (KI) ist schon derzeit eine der treibenden Kräfte der digitalen Transformation – und wird es in Zukunft noch mehr werden. Dank KI werden Maschinen zum Beispiel fähig sein, vorausschauend zu warten. Und in der Smart Factory eingesetzte Roboter verwandeln sich in autonome Assistenten, die selbständig lernen, logisch handeln und miteinander kommunizieren können.
Ebenso bahnt sich Machine Learning (maschinelles Lernen) als einer der für KUKA wichtigsten Bereiche der KI seinen Weg in die Fabrik und wird schon bald zu einem festen Bestandteil der Smart Factory werden. Lernende Maschinen können die von ihnen selbst erzeugten Muster und Ursache-Wirkungs-Beziehungen „verstehen“. Sie „lernen“ und reagieren darauf in Echtzeit, indem sie selbständig ihre Algorithmen verfeinern.
Nicht weniger revolutionär ist das Prinzip der Mixed Reality. Es kombiniert die Techniken der Virtual Reality (VR) und der Augmented Reality (AR). Virtual Reality heißt, dass der Nutzer völlig von der realen Welt abgeschnitten ist und sich in einer virtuellen Umgebung befindet, die über eine Brille sichtbar ist. Bei der Augmented Reality bleibt die reale Umgebung hingegen sichtbar, wird aber durch digitale Inhalte (virtuelle Objekte, Informationen) überlagert. Mit der Technologie der Mixed Reality lassen sich nun virtuelle Inhalte mit der realen Welt verbinden. Im Gegensatz zur Augmented Reality werden in der Mixed Reality Inhalte nicht einfach projiziert, sondern erscheinen mittels mobiler Endgeräte oder Head-Mounted Displays, wie z. B. der Microsoft Hololens, als Hologramm, das wirklichkeitsgemäß in die physische Welt eingebunden ist. Dieses lässt sich bewegen und verändern, als wäre es ein realer Gegenstand.
Die Zukunft hat also schon begonnen. Aber welchen praktischen Nutzen haben diese Technologien in der Industrie? Werfen Sie einen Blick auf einige von KUKAs Innovationsprojekten.
Mixed Reality Interface: Daten zum Greifen nah
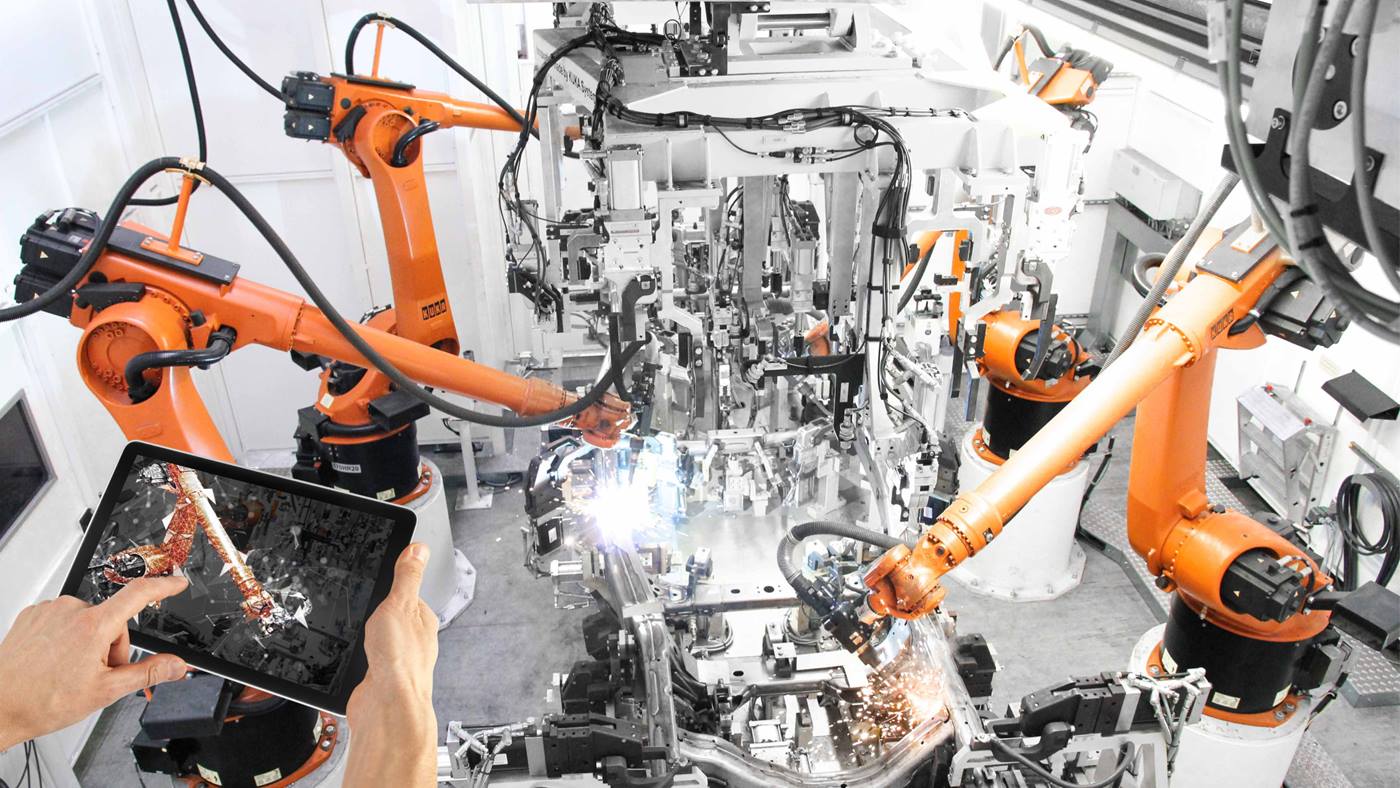
In unserem Mixed Reality Interface Pilotprojekt beschreiten wir neue Wege in der Mensch-Roboter- Interaktion: Mittels eines Head-Mounted Display (z. B. Microsoft Hololens) oder per App auf Tablet oder Smartphone können Anwender Daten zum Schutz- und Arbeitsraum des Roboters sowie zur Roboterbahn direkt an der Zelle sehen und so im wahrsten Sinne des Wortes „eingreifen“, um entsprechende Vorgaben zu programmieren. Das macht die Erledigung von Inbetriebnahme-Aufgaben wesentlich intuitiver und benutzerfreundlicher.
Mixed Reality Interface aus Sicht eines Anwenders: Der Schutz- und Arbeitsraum des Roboters ist klar erkennbar.
Mixed Reality Interface: Daten zum Greifen nah
KUKA.Sim: Smarte Simulationssoftware für KUKA Roboter
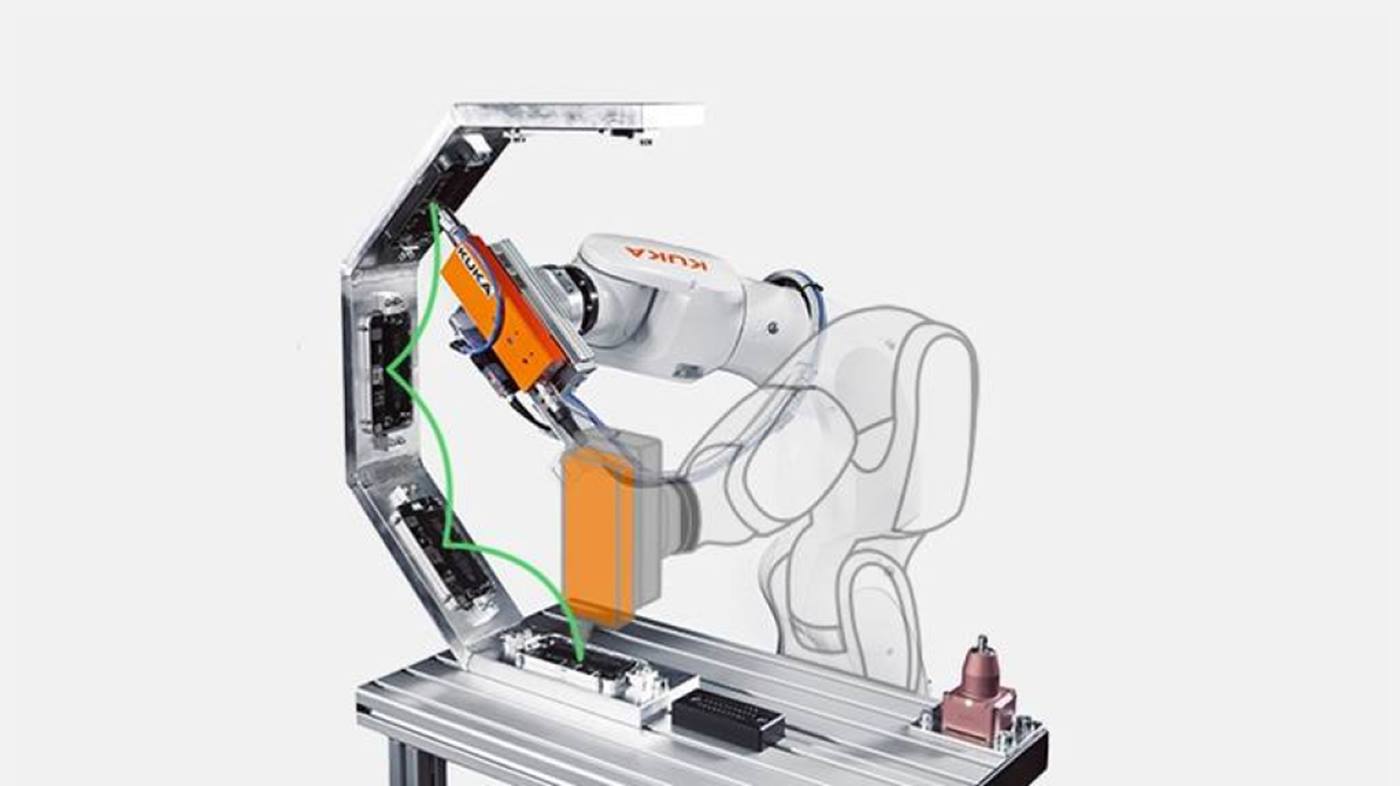
Mit unserer Simulationssoftware KUKA.Sim lassen sich Roboter außerhalb der Produktionsumgebung programmieren. Die Software ermöglicht es den Anwendern, mit einem digitalen Zwilling, also einem exakten virtuellen Abbild des späteren Produktionsprozesses, zu interagieren. Egal ob Design des Prozesses oder die Visualisierung von Materialflüssen und Engpässen oder des SPS-Codes: Die von Kuka.Sim erstellte 3D-Simulation deckt sämtliche Planungsprozesse ab. Virtuelle und reale Steuerung arbeiten dabei mit identischen Daten: Was virtuell geplant wird, findet später exakt so auch in der Realität statt. Das ermöglicht höchste Planungssicherheit der Fertigungsprozesse bei geringem Aufwand und Kosten.
KUKA.Sim 4.0: Smarte Simulationssoftware zur Programmierung von KUKA Robotern
KIVI: Künstliche Intelligenz verringert den Wartungsaufwand
Wenn man die Lebensdauer einzelner Roboter-Komponenten vorhersagen kann, lassen sich kostenintensive Ausfälle und Produktionsunterbrechungen vermeiden. Genau darum geht es in dem vom Bayerischen Staatsministerium für Wirtschaft, Energie und Technologie (StMWi) geförderten Forschungsprojekt „Künstliche Intelligenz zur Vorhersage der Einsatzsicherheit und Lebensdauer von Industrierobotern“ (KIVI). Ziel ist es, den Zustand von Industrierobotern kontinuierlich zu überwachen und eine vorausschauende Wartung zu ermöglichen (Condition Monitoring und Predictive Maintenance). Dazu übermitteln zunächst mehrere Sensoren das Betriebsschwingungsverhalten einzelner Roboterkomponenten. Bei der Auswertung der entsprechenden Daten kommt dann künstliche Intelligenz zum Einsatz: Sie erkennt Muster beim Entstehen von Verschleißzuständen und erlernt daraus Verhaltensmodelle. Das Ergebnis ist eine prototypische KI-Toolbox, die jetzt schon in der Evaluierungsphase ist. Sobald sie kommerziell eingesetzt werden kann, werden produzierende Unternehmen in der Lage sein, ihre Anlagenverfügbarkeit zu erhöhen und den Produktionsablauf effizienter zu machen – was nicht zuletzt auch zur Ressourcenschonung beiträgt.
Vorteile der Überwachung und präventiven Wartung durch KI
Erhöht die Anlagenverfügbarkeit.
Gestaltet den Produktionsablauf effizienter.
Schont Ressourcen.
Translearn: Roboter lernen Lernen
Der Ausgangspunkt aller Optimierungsprozesse von Industrierobotern sind Daten. Sie zu erzeugen und zu sammeln, kostet allerdings viel Zeit und Geld. Um zu sparen, können Daten heutzutage auch gesammelt werden, indem man Roboterinteraktionen einfach simuliert. Das Problem: Selbst weit fortgeschrittene Simulationen können die Realität noch nicht perfekt abbilden. Die in ihnen erlernten Handlungsstränge lassen sich nicht ohne weiteres auf reale Roboter übertragen. Diese Schwierigkeit wird oft als „Reality Gap" bezeichnet.
Genau hier setzt unser Projekt „TransLearn“ an: Wir wollen den Reality Gap überwinden, indem wir die Fehler der Simulation identifizieren. Ziel ist es, die simulativen Ergebnisse nahtlos auf reale Roboter zu übertragen.
Das bringt viele Vorteile mit sich: In der Simulation lassen sich Roboter schneller und besser programmieren, wodurch die Programmierkosten sinken. Außerdem können Roboter besser und eigenständiger lernen, wenn es sowohl in der Simulation als auch in der realen Anlage geschieht. Dank eines derart optimierten Lernprozesses müssen Industrieroboter in Zukunft überhaupt nicht mehr aufwändig programmiert, sondern nur noch instruiert werden. So lernen sie auch eigenständig, wie sie ihre Taktzeiten verkürzen oder weniger Strom verbrauchen.
OPERA: Roboter genauer steuern.
Mit OPERA sehen Anwender die wahrscheinlichen Bewegungsabläufe ihrer Cobots. Kollaborative Roboter, sogenannte CoBots, lernen, indem der Anwender mit ihnen per Hand die gewünschten Bewegungsabläufe durchführt. Man spricht daher auch von handgeführter Programmierung. Sie macht vor allem für mittelständische Unternehmen vieles einfacher. Trotz der intuitiven Handhabung ist das Verfahren aber noch mit einigen Finessen in Bezug auf Exaktheit und Fehlertoleranzen verbunden, so dass bei der Programmierung immer noch ein Experte dazukommen muss.
Genau hier setzt das Projekt OPERA an: Da bei Cobots nicht alle Fehlerquellen deterministisch bestimmbar sind, haben wir probabilistische Modelle entwickelt. Die Anwender können nun ganz einfach in einem 3D-Modell sehen, wo bei den Bewegungsabläufen ihres Cobots Ungenauigkeiten auftreten und entsprechend darauf reagieren. So profitieren sie von mehr Flexibilität und Genauigkeit und einer größere Ausfallsicherheit.
Mit OPERA sehen Anwender die wahrscheinlichen Bewegungsabläufe ihrer Cobots.
VWS4LS: Ein digitaler Zwilling treibt die Automatisierung voran
Der Leitungssatz (auch „Kabelbaum“ oder „Bordnetz“) ist eine der aufwändigsten und komplexesten Einzelkomponenten eines Automobils. Denn für eine neue Serie gibt es so viele individuelle Leitungssätze, wie es Ausstattungsvarianten gibt: Hunderttausende. Als derartige Einzelanfertigung sind Leitungssätze entsprechend teuer in der Herstellung. Gemeinsam mit anderen Partnern arbeiten wir deshalb an der Umsetzung einer "Verwaltungsschale für den Leitungssatz" (VWS4LS). Basierend auf der Technologie „Verwaltungsschale“ werden in diesem Projekt digitale Informationen zu jedem Leitungssatz so vervollständigt, dass ein interoperabler digitaler Zwilling für die Entwicklung, Produktion und Montage des Leitungssatzes im Automobil erstellt werden kann.
KUKA konzentriert sich dabei auf die Erstellung von Produkt- und Prozessbeschreibungen und auf die Ableitung der für die jeweilige Produktion erforderlichen Roboterbewegungen aus den entsprechenden Informationen der Verwaltungsschalen.
Erfahren Sie mehr über das Projekt VW4LS.
BaSys 4.2: Fertigungsprozesse werden flexibler
Unternehmen mit modernen Produktionsprozessen müssen schnell auf veränderte Nachfragen oder geänderte Bedingungen reagieren können. Insbesondere der Produktionsprozess benötigt daher häufig Anpassungen – am Prozess selbst, an den Produktionsressourcen, aber auch am herzustellenden Produkt Ein solches „kontinuierliches Engineering“ sollte daher zu jeder Zeit möglich sein. Mit BaSys 4 wurde bereits ein Basissystem für Produktionsanlagen entwickelt, das Produktionsprozesse effizient wandelbar macht. Mit dem vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projekt BaSys 4.2 arbeiten wir nun daran, weitere Industrie 4.0 Infrastrukturelemente auf Basis der Konzepte und Standards der Plattform Industrie 4.0 umzusetzen. Wir konzentrieren uns dabei auf die drei Themenfelder „Middleware“, „Fähigkeiten“ und „Virtualisierung“. So wollen wir standardisierte Fähigkeitsmodelle weiterentwickeln und ihre Verwendung in automatisierten Fähigkeitsüberprüfungen realisieren.
Das Ziel sind wandlungsfähige Produktionsanlagen, die intelligent und nachvollziehbar auf geänderte Anforderungen reagieren können.