Espaços de monitoramento com KUKA.SafeOperation
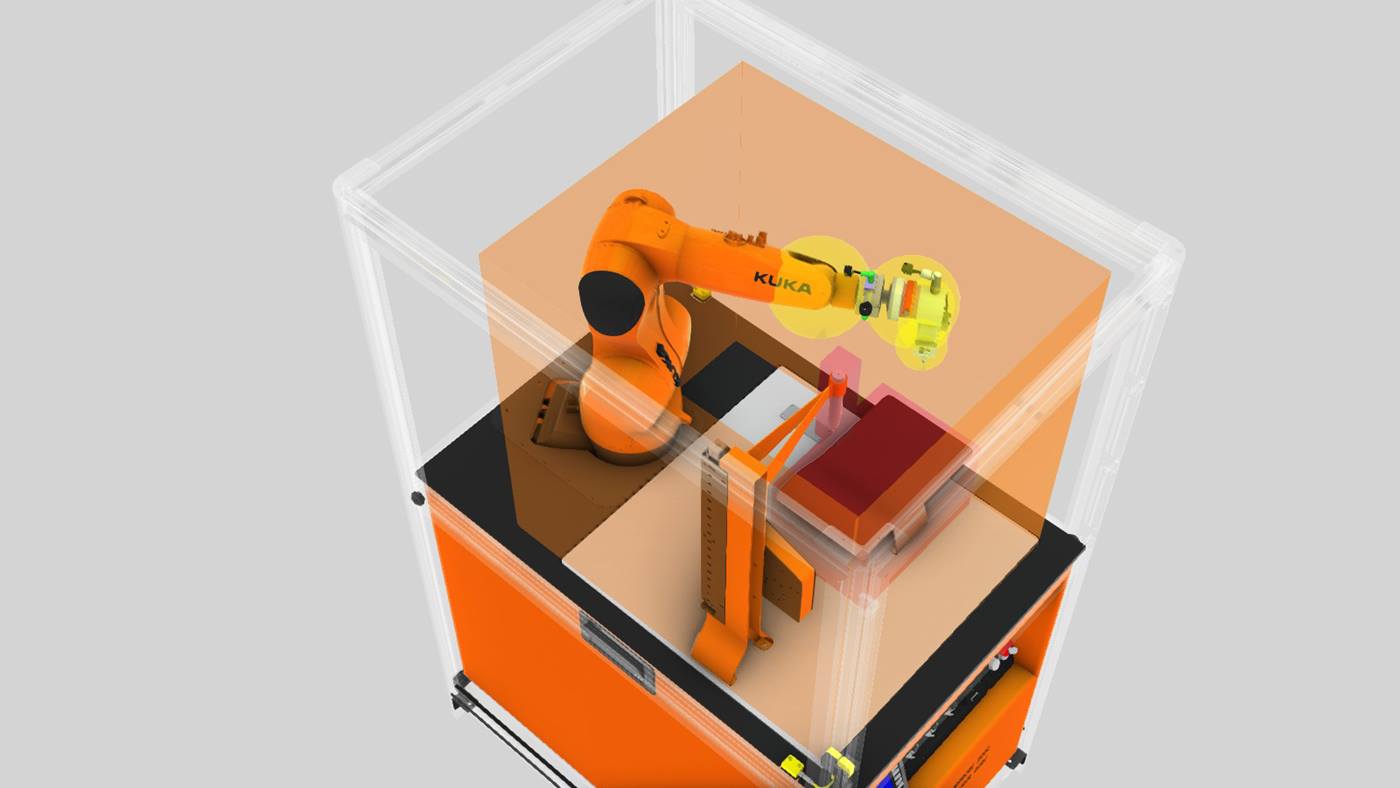
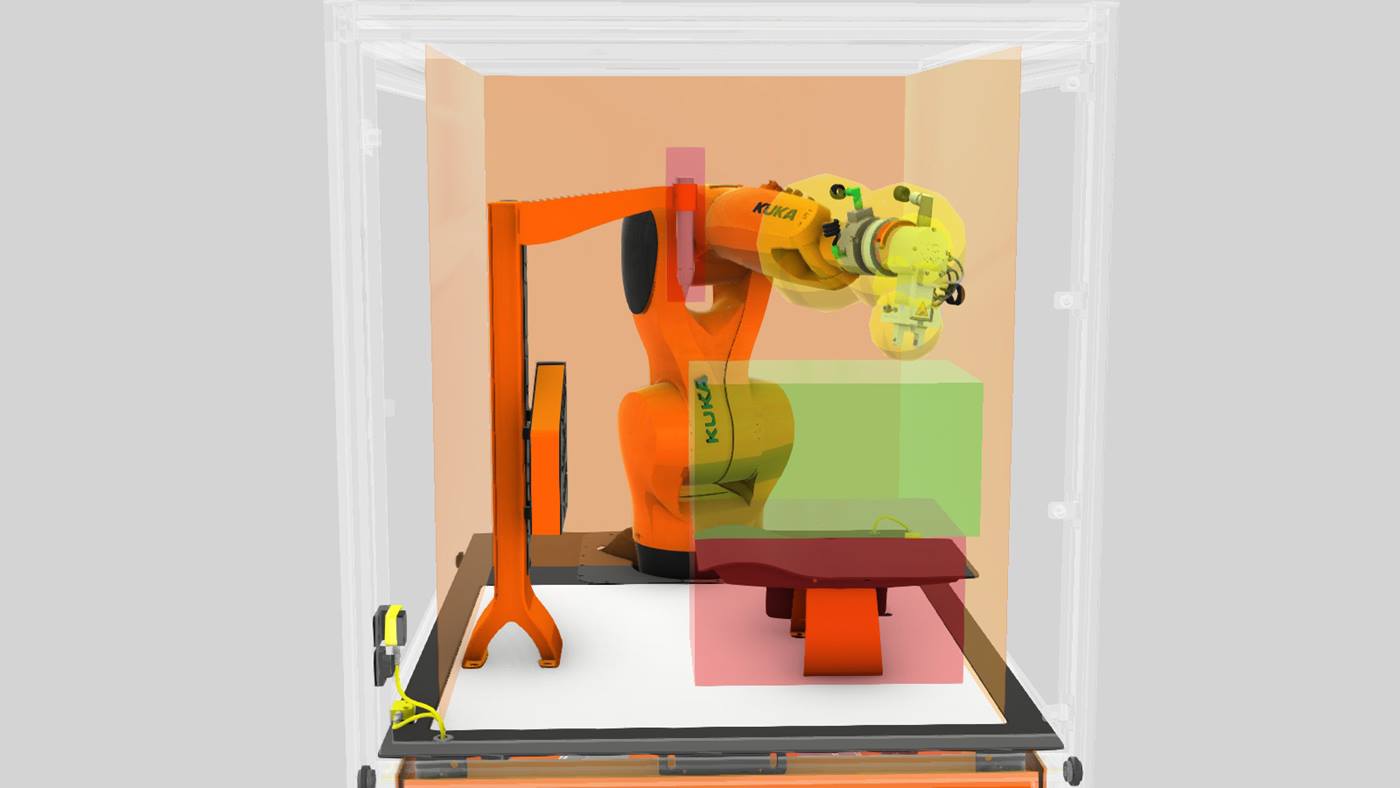
O foco é a segurança. Para a redução segura do espaço de trabalho teórico, o software oferece até 16 espaços de monitoramento e uma área de célula fixa – a definição desses espaços de monitoramento determina o comportamento do robô.
Cada área pode ser definida individualmente. Escolha entre a definição cartesiana ou específica do eixo. Além disso, você diferencia entre estes tipos de espaço:
- Espaço de trabalho
- Espaço de proteção
- Espaço de proteção de alarme (que não para)
- Espaço de trabalho de alarme (que não para)
- Área de célula (não comutável)