จดจำ ประกอบโครงสร้าง หยิบจับ: Bin Picking ทำงานเช่นนี้
หยิบจับชิ้นส่วนจากกล่องได้อย่างน่าเชื่อถือ โดยไม่ชนกับภาชนะ: ซึ่งสามารถทำได้อัตโนมัติด้วยแพ็กเกจเทคโนโลยี KUKA.SmartBinPicking ซอฟต์แวร์ผสานกับการจดจำผ่านการมองเห็นจาก Roboception ช่วยให้การหยิบจับชิ้นส่วนออกจากกล่องโดยไม่ปะทะกันและไม่เป็นเอกฐานด้วยหุ่นยนต์ KR AGILUS, KR CYBERTECH หรือ KR IONTEC ที่มีหกแกน
ชิ้นส่วนที่ไม่เป็นระเบียบไม่มีความท้าทาย
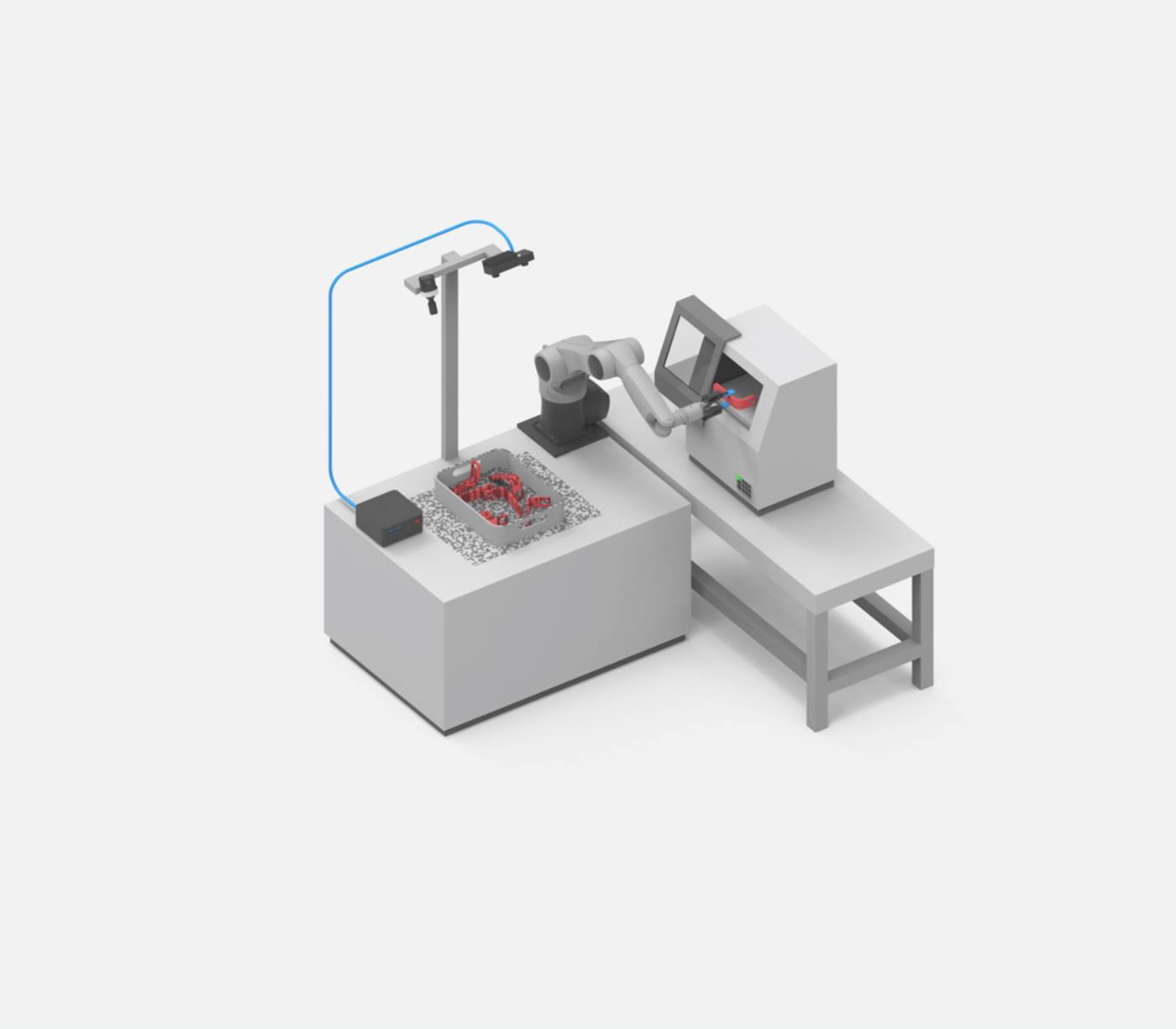
กล้อง 3 มิติจะจดจำและจัดลำกับวัตถุที่จัดเรียงแบบสุ่ม ซึ่งหมายความว่า: ซอฟต์แวร์จะประกอบโครงสร้างซึ่งสามารถหยิบจับชิ้นส่วนได้อย่างดีที่สุด แล้วกำหนดลำดับที่เหมาะสมที่สุด การวางแผนเส้นทางในตัวจะคำนวณเส้นทางที่ไร้การปะทะสำหรับ Bin Picking รวมทุกมุม เพื่อหยิบจับทีละชิ้นส่วนจากกล่อง การหยิบจับด้วยแกนที่ห้าหรือมือหุ่นยนต์จะได้มุมแม่นยำยิ่งขึ้น
เคลียร์เส้นทางเพื่อระบบอัตโนมัติและอุตสาหกรรม 4.0
ในขณะที่หุ่นยนต์หยิบชิ้นส่วนออกจากกล่องด้วยการหยิบจับที่แม่นยำสูง เส้นทางต่อไปจะถูกวางแผนขนานไว้แล้ว ซึ่งจะลดรอบเวลาลง การประมวลผลภาพของกล้อง 3 มิติและการวางแผนเส้นทางจะถูกดำเนินในคอมพิวเตอร์อุตสาหกรรมภายนอกที่ติดตั้งปลั๊กอินของ KUKA ลูกค้าจึงไม่ต้องกังวล เนื่องจากคอมพิวเตอร์จะได้รับแพ็กเกจซอฟต์แวร์ที่เสร็จสมบูรณ์ จึงหมายความว่า: เคลียร์เส้นทางสำหรับการหยิบจับในกล่องและ Bin Picking อย่างอัจฉริยะ
ปัญญาประดิษฐ์สำหรับการจดจำวัตถุมีบทบาทใดบ้าง
โมเดล CAD จะถูกโหลดในสภาพแวดล้อมการจำลองที่เหมือนภาพถ่าย เพื่อเตรียมการหยิบจับในกล่องและการหยิบจับอัจฉริยะให้ดีที่สุด ซึ่งระบบจะถูกฝึกที่นั่นและจะพัฒนารูปภาพด้วยคลังที่ครอบคลุมเพื่อตอบสนองความต้องการทั้งหมดในแง่ของปฏิกิริยาการเกิดสีและสภาพแสง กระบวนการอัตโนมัตินี้สามารถทำงานตลอดคืน เพื่อให้สามารถใช้งานการใช้งานวิทยาการหุ่นยนต์ได้วันถัดไป