Recognize, structure, grasp: that is how bin picking works
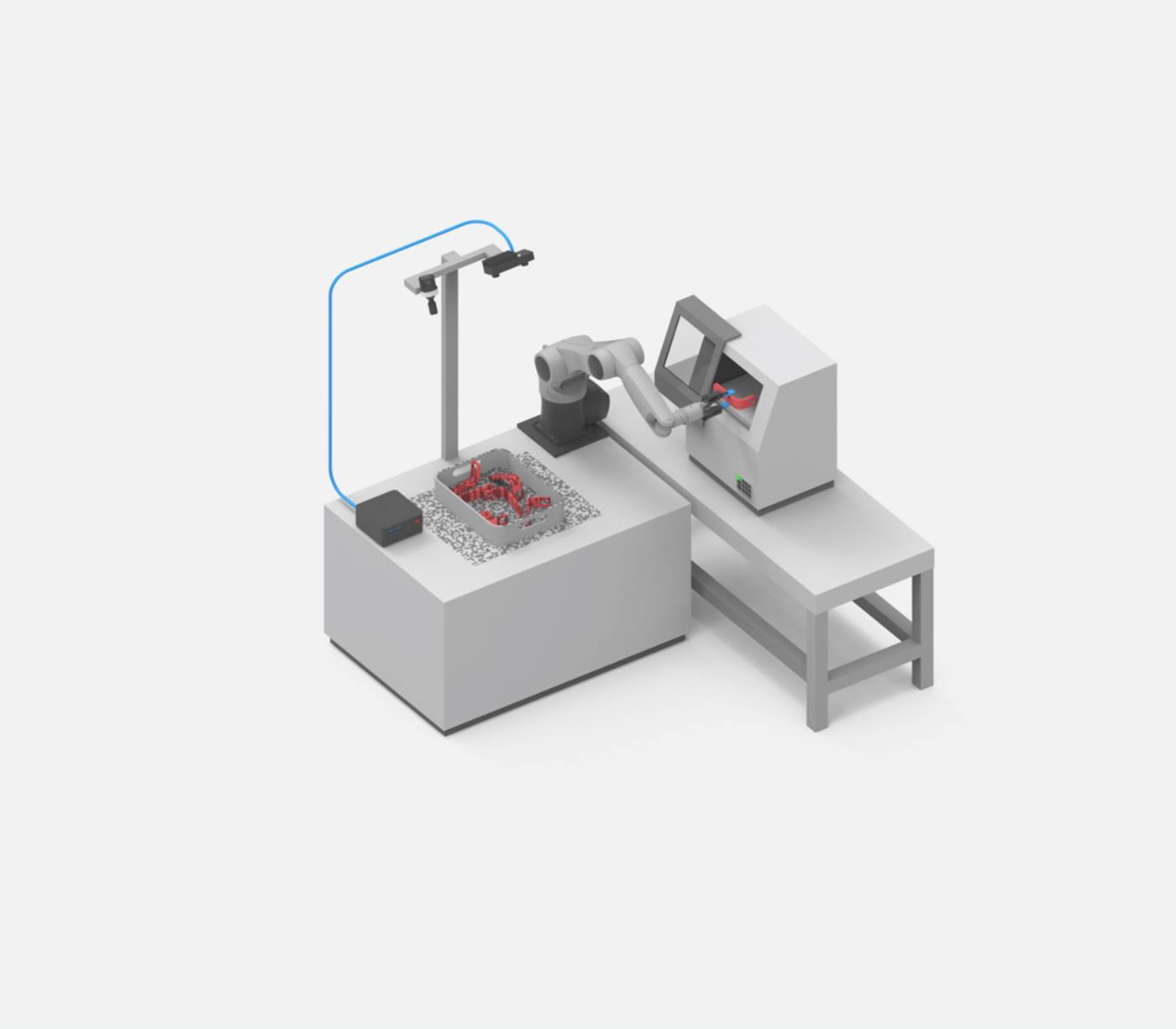
Reliably pick parts out of a bin without hitting the container: this can now be done automatically with the KUKA.SmartBinPicking technology package. Combined with vision recognition from Roboception, the software enables collision and singularity-free picking of parts from a bin by a six-axis KR AGILUS, KR CYBERTECH or KR IONTEC robot, for example.
Unsorted components pose no challenge
The 3D camera enables the randomly arranged objects to be recognized and prioritized. This means that the software structures which component it is best to pick and thus determines an optimal sequence. The integrated path planning calculates the collision-free path for bin picking including all angles to pick – part by part from the bin. By using the fifth axis, i.e. the robot wrist, for gripping, much more precise angles are possible.
Clear path to automation and Industrie 4.0
While the robot fetches a part from the bin with a highly precise gripping operation, the next path is already being planned in parallel. This shortens the cycle times. Processing of the 3D camera images and planning of the paths are performed on an external industrial PC on which a KUKA plug-in is installed. But the customer doesn’t have to bother about that, being supplied with a ready-made software package. Then the path to intelligent bin picking is clear.
What role does artificial intelligence play in object recognition?
To achieve the best possible preparation for intelligent bin picking, a CAD model is loaded into a photorealistic simulation environment. There, the system is trained and the image optimized for all requirements by means of an extensive library, for example with regard to color reactions and lighting conditions. This automated process can run overnight so that the robotic application can be used the next day.