SMARTHANDLE
KUKA arbeitet gemeinsam mit Forschungs- und Industrieeinrichtungen aus Griechenland, Spanien, den Niederlanden, Luxemburg und Belgien innerhalb des EU geförderten Projektes SmartHandle an der Verbesserung der Produktivität, Flexibilität und Nachhaltigkeit der Umschlagprozesse.
Das Ziel des Projekts ist es, Technologien zu entwickeln, die die europäische Industrie unterstützen können, wie:
-
Intelligente, rekonfigurierbare Agenten, welche die Flexibilität und Geschicklichkeit für Handhabungsanwendungen bieten
-
KI-basierte Softwarekomponenten (Reasoning) zur Verbesserung der Anpassungsfähigkeit und Effizienz von Verarbeitungsprozessen
-
Planungs- und Koordinierungsmechanismen auf hoher Ebene für den erfolgreichen Einsatz in realen Anwendungsfällen
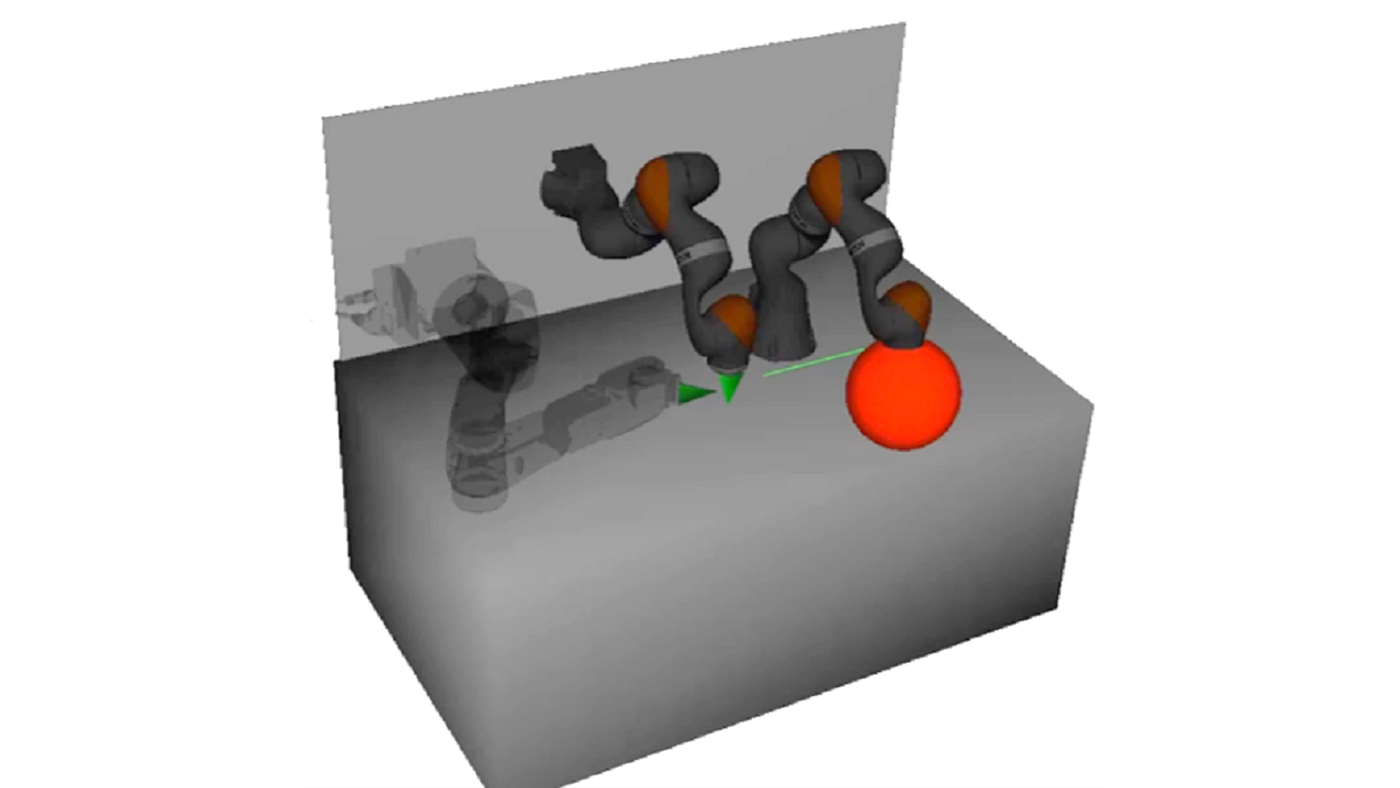
In diesem Projekt wird das KUKA TIC-Team verschiedene Herausforderungen angehen, wie beispielsweise die Steuerung eines mehrarmigen Robotersystems unter Berücksichtigung geometrischer Beschränkungen oder die Planung einer Bewegung ohne Verlust des gegriffenen Objekts.
Planung von Mehrarmrobotern
Wir arbeiten an der Entwicklung neuartiger Bewegungsalgorithmen zur Planung und Ausführung industrieller Aufgaben auf ein- und mehrarmigen Robotersystemen. Unsere Algorithmen können basierend auf Aufgabenbeschreibungen, die CAD-Daten und geometrische Randbedingungen kombinieren, durch Ausnutzung von Roboter- und Prozessredundanzen ausführbare Bewegungen berechnen. Da die geometrischen Randbedingungen in geschlossenen Regelkreisen auf verschiedenen Systemen angewandt werden, können klassische Positionsregelungsstrategien keine praktikablen Lösungen liefern, die den Anforderungen der Systeme genügen und somit nicht die Sicherheitsanforderungen erfüllen. Daher werden neue Methoden entwickelt, die auf der Kombination von Positions-, Kraft- und Impedanz-Kontrolle für mehrarmige Systeme basieren. Diese Steuerungssysteme sollten nicht nur ausschließlich Eingaben vom Prozessplaner erhalten, sondern auch Feedback von ihren robotischen Gegenstücken. Die Entwicklung und die globale Implementierung dieser Steuerungsarchitektur wird der Schwerpunkt der Mehrarmroboterplanung sein.
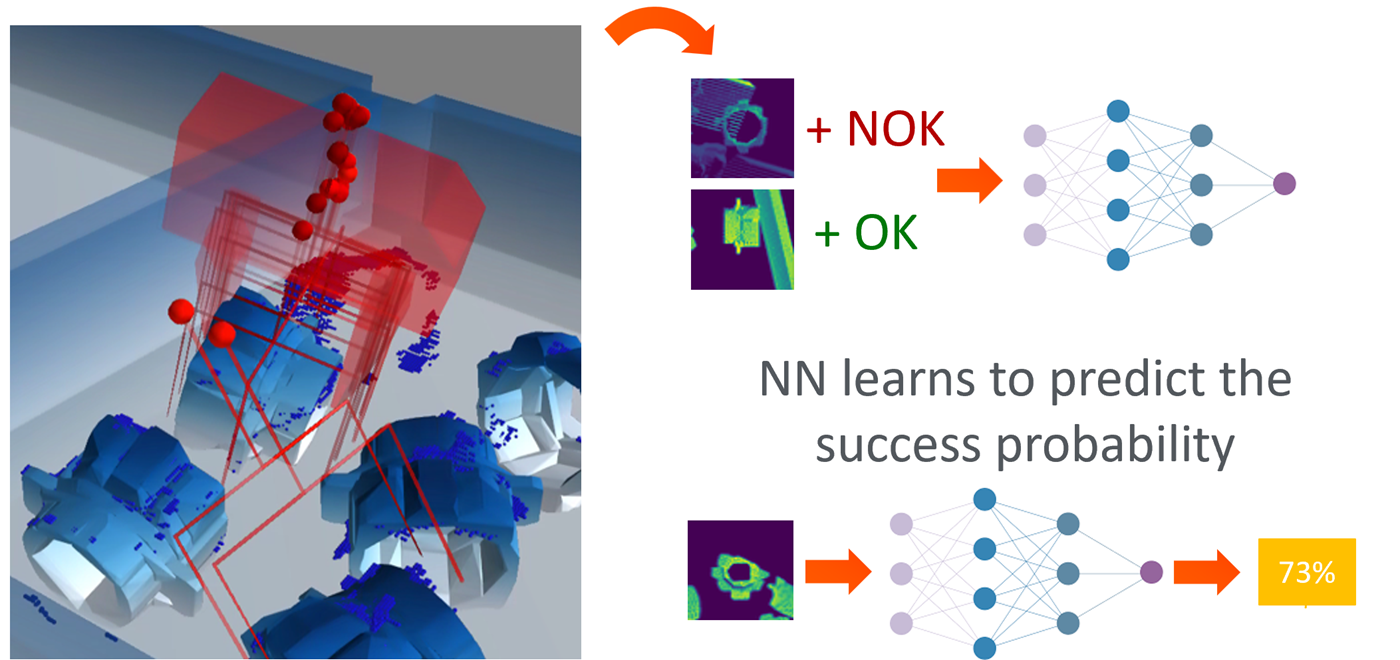
KI-basiertes Greifen
Zum Greifen von bekannten und unbekannten Werkstücken werden wir bestehende lernbasierte Greiftechniken anpassen und erweitern, insbesondere indem wir sie vom einarmigen Greifen zum zweiarmigen Greifen weiterentwickeln. Mit diesen Techniken werden ausführbare Greifvorgänge ermittelt, indem diese nach ihrer Greiferfolgswahrscheinlichkeit bewertet werden.
Die von KUKA entwickelten Technologien werden in zwei realen Industrieszenarien evaluiert und validiert. Das erste Szenario, das vom griechischen Hersteller von Aluminiumprodukten ALUMIL vorgeschlagen wurde, bezieht sich auf die Handhabung und den Transport von sperrigen Werkstücken wie etwa Aluminiumprofilen. Das zweite Szenario, vorgeschlagen vom belgischen Automobilzulieferer ABEE, betrifft die Demontage von Autobatterien.