The initial situation
The German Aerospace Center (DLR) set itself the goal of developing efficient production technologies for CRP components. CRP parts – such as aircraft frames – are produced fully automatically on a new production line measuring 45 meters in length. Manufacturing aircraft components from CRP is still very expensive and requires a high degree of manual labor. As a dedicated research institution, the DLR wants to change this situation for future generations of aircraft.
CRP is light and stable, but the high requirements of aircraft manufacturers are only met if the entire process sequence, and thus the quality, is reproducible. Unlike aluminum, CRP can be of highly variable quality, for example if the fibers are not optimally aligned or if moisture enters the composite material through cut edges. Furthermore, any mechanical damage to the material is not outwardly visible. Utmost accuracy is thus required during manufacture.
The system must be flexible, as it is designed for research contracts and not real series production. It was of decisive importance for both the system concept and the programming to be as free as possible. Tool changing must be quick and easy and robot programming should be intuitive. The students should be able to implement new tasks/products on the system after a brief learning phase. That is just as relevant for practical operation because a mid-sized airliner has around 140 frame segments, with virtually no two parts being identical.
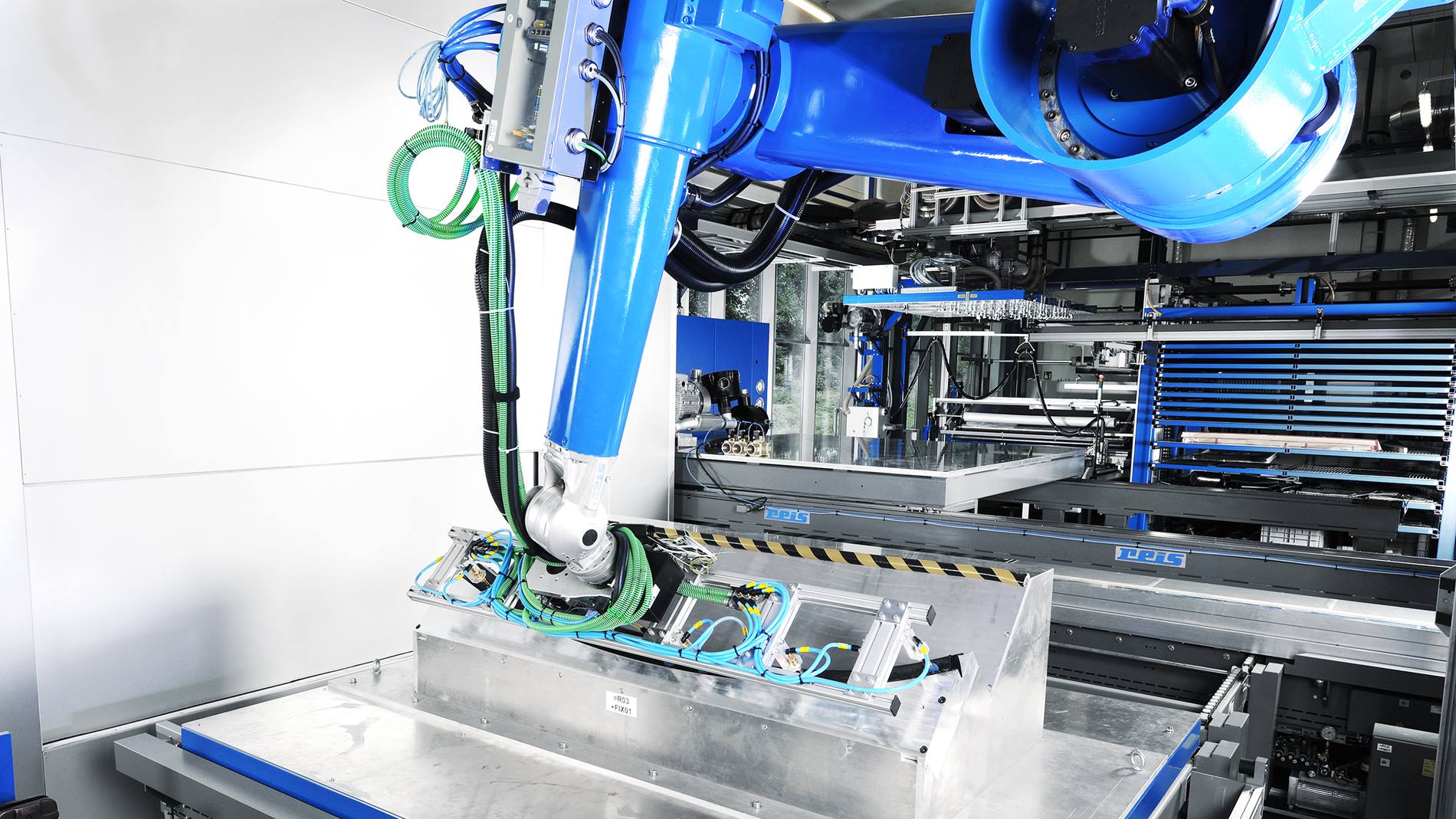
After this forming step, the consolidated preform can be transferred by the handling robot to the mold of the following fine trimming station. The handling robot moves along a linear axis that is installed high up in order to maximize freedom of movement in the production shop. The robot links the individual process stations. Path programming of the robot is carried out offline on the basis of the CAD data of the workpiece and the fastCURVE path programming software from Cenit. Via a corresponding interface, the Reis ROBOTstarV controller enables a very precise, flowing path, as it is not just taught as a polygon with point-to-point motions. This means that a programmed path can also be offset subsequently by a specified amount.
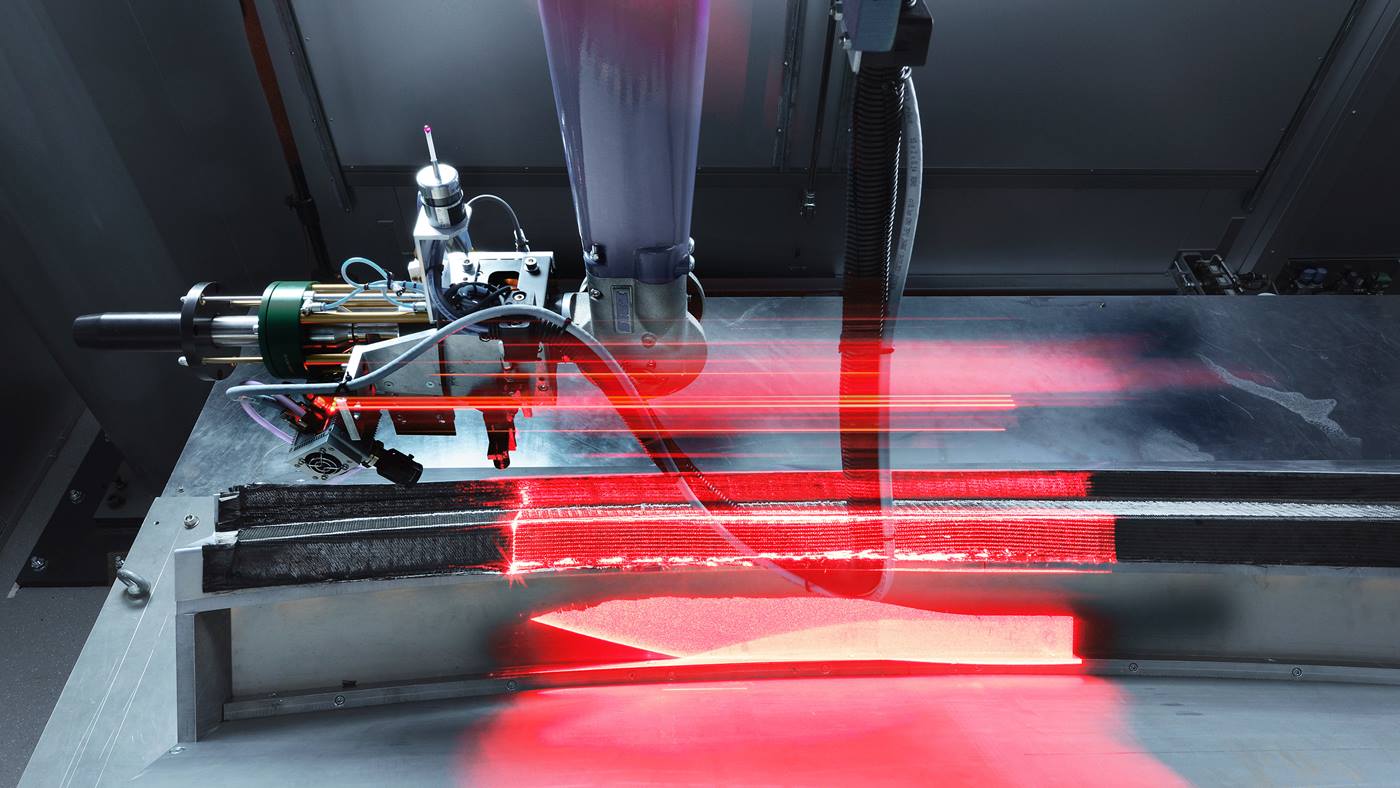
The path programming of the robot is carried out offline on the basis of the CAD data of the workpiece and a path programming software package. Via a corresponding interface, the KRC ROBOTstar controller enables a very precise, flowing path. This means that a programmed path can also be offset subsequently by a specified amount. By selecting the optimal cutting tool, an ultrasonic knife can cut very precisely without affecting the surrounding material.