Reconnaître, structurer, saisir : voilà comment fonctionne le dévracage
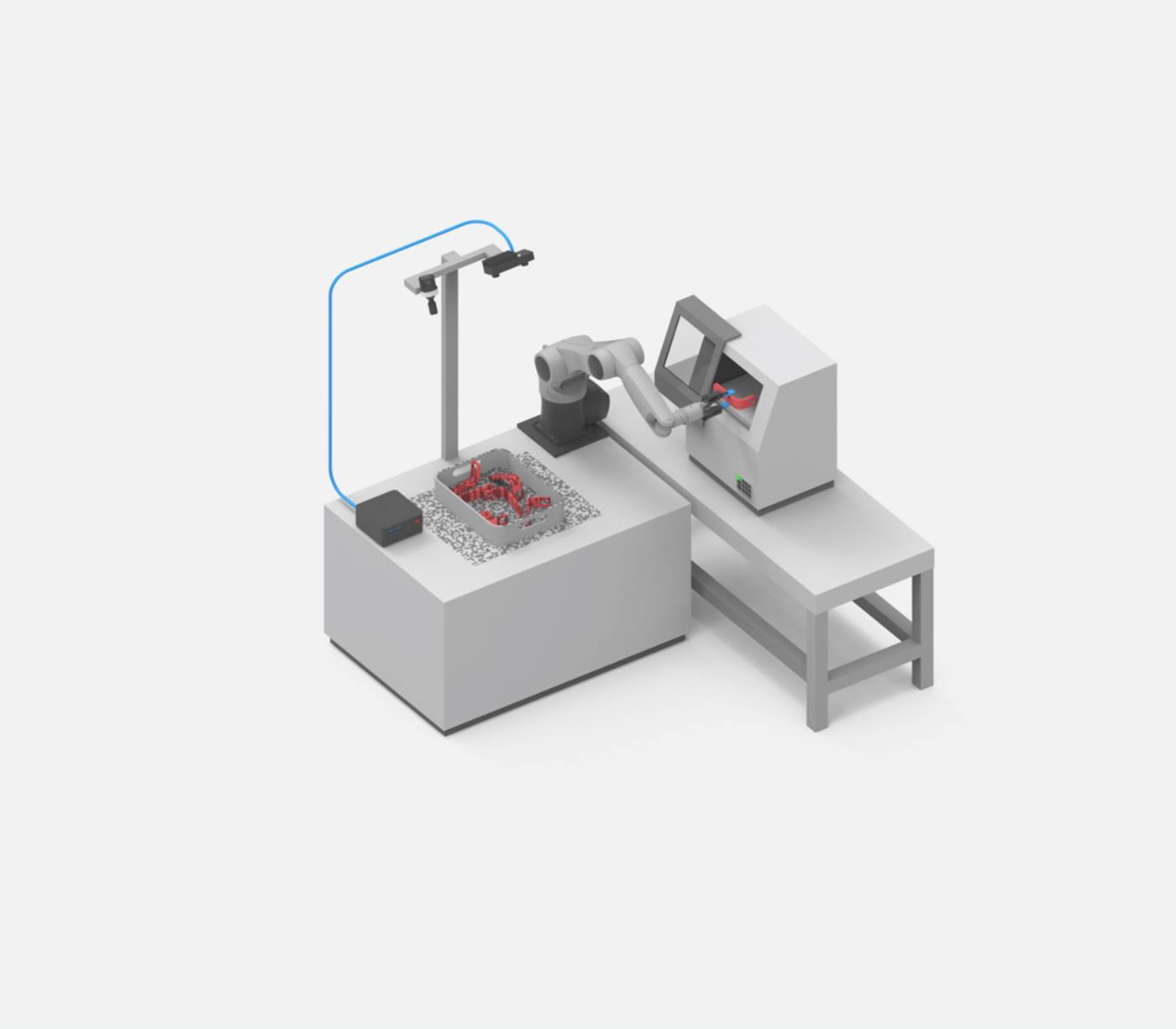
Saisir de manière fiable des pièces dans une caisse sans heurter les bords : avec le progiciel technologique KUKA.SmartBinPicking, cela est désormais possible de manière automatisée. Le logiciel, combiné à la reconnaissance de pièces grâce au matériel Roboception, permet la préhension sans collision et sans singularité de pièces dans une boîte, par un robot à six axes KR AGILUS, KR CYBERTECH ou KR IONTEC par exemple.
La voie est libre pour l’automatisation et l’Industrie 4.0
Tandis que le robot extrait une pièce de la caisse avec une prise de haute précision, la prochaine trajectoire est déjà planifiée en parallèle. Cela permet de réduire les temps de cycle. Le traitement des images de la caméra 3D et la planification de la trajectoire sont effectués sur un PC industriel externe dans lequel un plugin KUKA est installé. Le progiciel est prêt à l’emploi, ce qui rassure l'opérateur. Ainsi, le dévracage et le Bin Picking intelligent se font facilement.
Un savoir-faire étendu et adaptable à tous les besoins
En plus du KUKA.SmartBinPicking, notre savoir-faire s'étend encore plus loin et s'adapte à vos besoins. Nous pouvons ainsi travailler avec d'autres partenaires, comme pour la Ready2_BinPicking. Ce produit prêt à être intégré, a été créé sous forme de modules facilitant l'installation dans son environnement. Cette solution est personnalisable en fonction des besoins et des systèmes de vision d'autres marques, combinés à leur logiciel propre peuvent être mis en place.
[Ready2_BinPicking, produit prêt à être intégré utilisant une caméra 3D et un logiciel partenaire.]
Quel est le rôle de l’intelligence artificielle dans la reconnaissance des objets ?
Pour préparer au mieux le dévracage et le Picking intelligent, un modèle CAO est chargé dans un environnement de simulation photoréaliste. Le système y est entraîné et l’image est optimisée en fonction de toutes les exigences grâce à une vaste bibliothèque de réactions aux couleurs et de conditions d’éclairage. Ce processus automatisé peut fonctionner pendant la nuit, de façon à utiliser dès le lendemain l’application robotique.